https://www.baronerosso.it/modellismo_articoli/show/521/lipoly-monitor-con-autodetect-per-1-2-3-4-celle.html
 |
||||||||||
|
||||||||||
|
|
||||||||||
|
Premessa Questo dispositivo serve per monitorare la tensione delle batterie LiPoly, tanto rivoluzionarie nel mondo modellistico quanto delicate. Molti modellisti hanno tanti regolatori con circuito di cut-off che spesso non è programmabile e quindi non utilizzabile per le celle LiPoly. Per evitare di scaricare eccessivamente le celle e quindi procedere a un tedioso recupero di emergenza caricando con 1C le celle (o addirittura cestinarle se la scarica aggressiva capita diverse volte), è necessario effettuare un rientro con il modello e far terminare la scarica il prima possibile. Fortunatamente le celle LiPoly, a differenza delle NiCd e NiMh, hanno una curva di scarica molto più lineare, pertanto non è necessario effettuare uno stop brutale o comunque una drastica riduzione di potenza che spesso è causa di panico per la difficoltà di recupero che sorge senza poter disporre di motore. Inoltre ci sono altri parametri che influiscono sulla soglia di intervento:
Come funziona |
 |
|
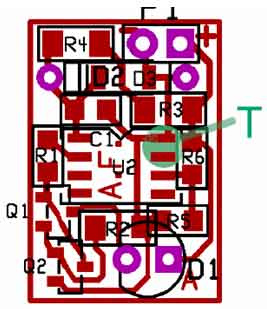
Il circuito Il cuore di tutto il circuito è il PIC12F675 opportunamente programmato. Questo piccolo microprocessore, oltre a funzionare egregiamente fino a soli 2V (e anche meno), ha un oscillatore interno ed un convertitore analogico-digitale commutabile su diversi piedini, consentendo di ridurre molto le dimensioni del circuito. Il diodo zener D2 fornisce una tensione "quasi stabile" al Pic. In realtà, al variare della tensione di batteria, varia leggermente anche la tensione ai capi dello Zener, e con una sola cella, quando la tensione è bassa, ben presto il diodo diventa praticamente inutile, portando la tensione ai capi del pic quasi proporzionale a quella di batteria. Le Resistenze R6 ed R5, fanno da partitore per ridurre la tensione ad un livello inferiore a quella di alimentazione del PIC in modo che possa essere regolarmente letta. I valori resistivi alti, garantiscono anche l'integrità dell'ingresso del PIC, visto il rumore che spesso viene generato dal motore e/o regolatore. I transistor Q1,Q2, insieme ad R2, costituiscono un semplice generatore di corrente costante (20mA circa), in modo da fornire sempre la massima corrente in range di sicurezza per il Led anche con lampeggi prolungati o continui. In caso di inversione di polarità, lo Zener D2, direttamente polarizzato, causa una caduta di appena 0,6-0,7V, ed il resto della tensione cade sulle resistenze R3 ed R4. Il pic si trova alimentato con -0,6V che è una tensione inversa che non provoca danni permanenti. Il diodo Led polarizzato inversamente si oppone al passaggio di corrente, pertanto tutto lo stadio finale rimane al sicuro. Ovviamente, nulla funziona fino al ripristino della corretta polarità. La resistenza serie allo Zener (R3+R4) è stata scomposta in due resistenze per dissipare adeguatamente il calore in caso di alimentazione con 3 e 4 celle. La maggior complessità risiede nel software... All'interno della memoria, vengono memorizzate due piccole tabelle:
All'accensione, viene acceso temporaneamente il Led per segnalare che il circuito è alimentato e si sfrutta questo tempo e del tempo ulteriore per attendere che i servi si posizionino e i regolatori emettano eventuali beep tramite il motore. Quando si presume che tutto questo sia finito, e quindi la batteria non sia sotto carico, in particolare sotto carichi induttivi ( del motore e servi), il PIC inizia a leggere ad intervalli regolari la tensione. Inoltre subito dopo lo spegnimento del Led viene controllato se è richiesta la (ri)taratura, ma di questo si parlerà nell'apposita sezione. Il PIC, esegue ben 256 letture di tensione e viene fatta la media del valore rilevato. Viene poi confrontato con i valori della prima tabella e quindi determina quante celle stanno alimentando il circuito. A seconda del numero di celle rilevate, viene fatto lampeggiare il LED "n. celle rilevate" volte. A questo punto viene fatta una pausa di circa 3 secondi, per evitare che in caso di celle scariche, il lampeggio di allarme e il lampeggio di detect risultino attaccati, impedendo all'utente di capire con precisione quante celle sono state rilevate. Il LiPoly monitor è pronto. Ancora una volta, vengono eseguiti ciclicamente "pacchetti" di 256 misure, dal quale si ricava il valore medio, così si filtrano eventuali bruschi cambiamenti di tensione dovuto alle commutazioni dei regolatori. Il valore ricavato viene costantemente confrontato con la parte di tabella relativa al numero di celle rilevate e quando il confronto indica la batteria scarica, inizia il lampeggio. Più lo scostamento fra il valore misurato e il valore in tabella è alto, più la frequenza di lampeggio è alta. Sono previsti fino a 10 frequenze (compreso lo spento :P) per 2,3,4 celle. Anche per una cella, sono previsti via software 10 frequenze, ma sotto i 2,7-2,8 Volt, i bilanci energetici del circuito sono gravemente influenzati dalla curva dello zener che si trova a funzionare in modo poco lineare e quindi, normalmente si riescono ad ottenere solo 4-5 frequenza diverse. Scendendo ulteriormente, si rischia di non vedere aumentare la frequenza di lampeggio. E' anche vero comunque che l'obiettivo di allarme a 3V non è mancato e quindi il circuito risulta comunque utile, in particolare per gli F3K o modelli da pendio che vogliono utilizzare una sola cella per alimentare i servi. |
 |
 |
|
Perché e come funziona la taratura
All‘accensione e dopo il lungo lampeggio iniziale del Led, il Pic controlla la tabella delle tensioni per l'autodetect presente in EEProm. Se la tabella è vuota significa che è la "prima accensione assoluta". In questo caso, il led lampeggia ciclicamente per 3 volte consecutive, segnalando la mancata programmazione ed attende che venga fatta. Quando viene dato il consenso alla taratura, il Led smette di lampeggiare e viene considerata la tabella per il detect presente nella Flash (che è la tabella ricavata sperimentalmente), In base al valore di alimentazione rilevato, viene effettuata una correzione matematica dei valori della tabella e i nuovi valori vengono salvati in EEProm. Fatte queste operazioni, con la stessa "proporzione" viene modificata la tabella contenente i valori di riferimento per l'allarme di batteria scarica e anche questa salvata in EEProm. Quando anche queste operazioni sono concluse, il sistema entra volutamente in blocco ed accende il Led in modo permanente, segnalando che la taratura è stata eseguita. Succede quindi che, nel funzionamento normale, le tabelle utili sono quelle memorizzate in EEProm e non quelle di "default" nella Flash, anche se è possibile che coincidano. In questo modo, si riesce sempre ad ottenere una precisione migliore del 3% nel peggiore dei casi, cosa diversamente impossibile se non utilizzando costosi ed ingombranti regolatori a bassa tensione ( da 2V,), Low Drop di precisione.
Tarare il LiPoly Monitor v1.1
|
|
Se non si sono verificati malfunzionamenti il Monitor è pronto. Normalmente, la tolleranza si aggira intorno a 50-80mV. I 360mV per le 4 celle (3%) è un caso limite. Se invece qualche verifica non vi convince, o se siete pignoli e volete tolleranze inferiori, potete ripetere la taratura variando i 5,95-6V iniziali con "dosi correttive" di 50 -100mV in più o in meno a seconda dell'aggiustamento desiderato. Per le tarature successive alla prima, il corto circuito al punto "T" va tenuto dall'accensione. Per il resto la procedura è identica. Questo perché rilevando già una tabella, il circuito passa al funzionamento normale e non si pone in un'attesa infinita. |
||
 |
||
|
Realizzazione
Programmazione PIC |
||
All'interno del file trovate le due etichette (per la versione a Led e per quella con buzzer) che potete realizzare con carta adesiva e proteggere con del semplice nastro scotch trasparente. |
||
|
File con la dcoumentazione, hex per la programmazione e master dello stampato |
||
|
Nota Importante: |

https://www.baronerosso.it/modellismo_articoli/show/521/lipoly-monitor-con-autodetect-per-1-2-3-4-celle.html