https://www.baronerosso.it/modellismo_recensioni_utenti/show/1426/igyro-3e-powerbox.html

I giroscopi a 3 assi per il controllo e la stabilizzazione degli aeromodelli sono sempre più presenti a bordo dei nostri aerei Rc. Se ne trovano in commercio per tutti i gusti ed i prezzi ma, spesso (e ancor di più in questo caso) per coniugare reale efficienza, facilità di programmazione e assistenza è necessario optare per prodotti di fascia medio/alta, specie se questi oggetti devono essere installati su modelli di un certo valore.
Mi è capitato in questi ultimi tempi di provare alcuni giroscopi a 3 assi di marche blasonate e non e devo ammettere che la differenza si nota eccome. Quello che non avevo ancora potuto testare ma che mi aveva colpito per i tanti commenti positivi di chi lo aveva acquistato, era l’iGyro di Powerbox. La serie iGyro è composta dal piccolo 1e, dal nuovo 3e e dall’ammiraglia SRS. Quello che ho voluto provare è quello di fascia intermedia, l’iGyro 3e, che è anche l’ultimo nato in casa Powerbox. In accoppiata con il 2e ho preso anche il sensore Gps che ne esalta le caratteristiche e l’efficacia.

Caratteristiche
Partiamo dalle caratteristiche di questo iGyro 3e che ha dimensioni ridotte 40x39x15mm per un peso di soli 36 grammi compresi i cavi di connessione alla rx. Può essere alimentato da 4 a 9V e consuma circa 40mah per un assorbimento carico massimo di 20A; il funzionamento può essere sia Heading che Normal mode (nel primo caso il modello è spinto a tenere l’ultima posizione assunta, nel secondo il giroscopio ha la funzione di mantenere in assetto il modello) e accetta segnale in entrata e uscita PWM; ha la possibilità di collegare 1 servo per direzione, 2 per alettoni e due per profondità oltre ovviamente al canale del guadagno regolabile dalla trasmittente oltre a poter scegliere l’orientamento di montaggio sul modello.
Le caratteristiche di controllo sono dunque identiche a quelle del fratello maggiore “iGyro SRS” e la qualità riflette i più alti standard di PowerBox che si è ormai distinta da anni nel settore Rc per una completa e vasta gamma di prodotti dedicati all’elettronica di bordo. Grazie poi al nuovo software V3 e in accoppiata con il sensore Gps questo gioiellino fornisce un effetto giroscopico costante nei diversi range di velocità (sappiamo infatti che all’aumentare della velocità l’azione del giroscopio dovrebbe diminuire e, al contrario, aumentare al ridursi della velocità…).
Le funzioni
Il canale per la regolazione del guadagno dell’iGyro 3e Powerbox (per guadagno si intende la quantità di correzione che il giroscopio applicherà sui comandi, es. meno guadagno = meno movimenti delle parti mobili comandate dal giroscopio) è diviso in due intervalli (100% negativo – 0 – 100% positivo) in modo tale da permettere al pilota di predefinire diversi modi di volo tramite il trasmettitore. Il 3e iGyro può essere utilizzato in modalità Heading o Normal fornendo una maneggevolezza naturale in volo.
La modalità Heading ad esempio può essere utilizzata per il decollo e l'atterraggio ottenendo un modello insensibile a colpi di vento anche laterale. Gli intervalli di regolazione sono facili da settare grazie ad un cavo Usb collegato ad un Pc ed il software gratuito Powerbox terminal; con questo software si può inoltre regolare l’effetto del giroscopio su ogni asse.
Installazione
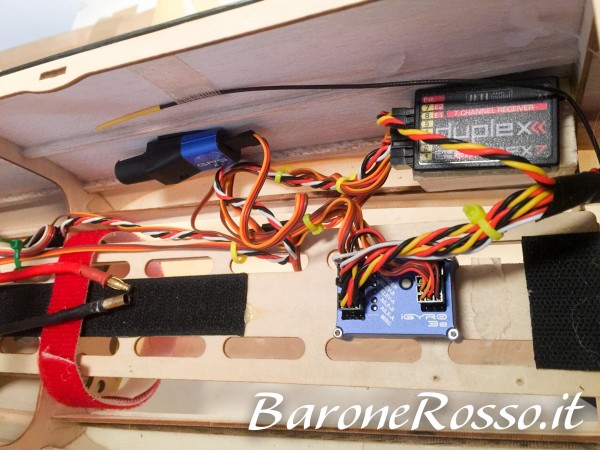
L’installazione standard del dispositivo iGyro 3e è quella al centro del modello e nella direzione di volo, le impostazioni di default sono per un montaggio orizzontale con le prese rivolte in avanti (si può variare anche la posizione di montaggio sempre tramite il software di connessione al Pc).
Si inserisce come sempre tra Rx e servocomandi mentre il canale del guadagno andrà su un canale rotativo della Rx in maniera tale da poter sfruttare tutta la gamma di escursione del guadagno (-100% - +100%). Ricordo che solitamente la percentuale negativa del guadagno viene associata alla funzione “Heading” (ovvero tenuta dell’ultima posizione del modello), mentre la positiva al funzionamento “Normal”. Questa funzione può essere comunque invertita tramite il software di programmazione spuntando le caselle “HD”. Quando siete in condizione 0/+100% sull’iGyro si accenderà una luce verde, da 0/-100% sarete in modalità Heading. Prima di ogni prova verificare che il senso di correzione dei comandi sia giusto muovendo il modello e verificando tutti e tre gli assi; se un canale fosse contrario sarà sufficiente agire sul tastino sull’iGyro e tenerlo premuto per 5 secondi fino a che tutti i LED si spengono; rilasciare poi il tasto e il led Aileron si accenderà di un verde debole, premere ancora brevemente il tastino e questo canale sarà invertito e il led si illuminerà di rosso; ogni volta che si inverte un canale la nuova impostazione viene immediatamente memorizzata.
E’ inoltre essenziale accendere sempre prima il trasmettitore, poi la Rx e attendere che il processo di avvio sia completo prima di muovere il modello; questo consente al giroscopio di resettarsi.
In volo
L’ iGyro 3e è ora pronto per il primo test di volo. Ricordatevi che è sempre bene disabilitare il giroscopio (in questo caso cursore del canale guadagno al centro = 0%) la prima vola di prova in quanto il comportamento del modello deve essere verificato in quota. Va innanzitutto detto che l’iGyro 3e PowerBox è praticamente “pronto all'uso” in quanto grazie a sofisticati algoritmi ha già memorizzati settaggi standard che ben si adattano a gran parte dei modelli senza necessitò di un lungo lavoro di settaggio. E’ ovviamente però possibile rifinire ogni intervento dell’iGyro sul volo.
Dopo aver trimmato il modello aumentare pian piano il guadagno del giroscopio finché il modello inizia ad oscillare attorno a un asse, quindi ridurre l'impostazione fino al punto in cui il modello non oscilla più a qualsiasi velocità. Se questo test si effettua in condizioni di calma piatta sarà possibile raggiungere una regolazione più accurata del giroscopio.
Per chi invece vuol rifinire la programmazione la domanda nasce spontanea: come faccio a verificare durante il settaggio dei tra assi dell’iGyro qual è il canale che necessità di diminuzione di guadagno e quale eventualmente di vedere aumentati i valori di intervento? Semplice: per un settaggio ad hoc dovrete effettuare le registrazioni del guadagno un asse per volta. Per fare questo collegate l’iGyro ad un Pc tramite un adattatore Usb (vanno bene sia quelli Powerbox che Jeti o Graupner) e mettete a 0 il guadagno degli alettoni e quello del quota lasciando a +/- 100% quello del direzione. Effettuate il volo verificando la quantità di guadagno che necessita il canale direzione aumentandolo o diminuendolo con il canale rotativo o a slitta. Una volta verificato che questo canale è ben registrato atterrate, ricollegate l’iGyro al Pc e segnatevi sul Powerbox Terminal il valore riportato sul canale corrispondente al direzione. A questo punto ripetete l’operazione per i 3 canali. Ci vorrà un po’ di tempo ma sicuramente farete un lavoro accurato!
Dopo queste operazioni è sempre bene effettuare alcune manovre di controllo del modello per vedere se i comandi rispondono bene e non ci sono correzioni indesiderate o oscillazioni. Ricordatevi che il timone verticale può essere controllato dal giroscopio solo per condizione “Normal”. Infine, dopo aver trovato le impostazioni di guadagno ottimali nei diversi test di volo agendo sul canale rotativo del guadagno, sarà possibile assegnare un interruttore a tre posizioni per commutare il 3e iGyro nelle modalità Heading, disattivato oppure Normal.

Il sensore Gps II
Originariamente introdotto come mezzo di regolazione del guadagno in funzione alla velocità del modello, ora il GPS II Powerbox è divenuto uno strumento completo per misurare velocità, altitudine, distanza, distanza percorsa e geo coordinate: tutto questo visualizzabile sia su Tx tramite protocolli di telemetria (il GPS II è predisposto per telemetria M-Link. Ma si può utilizzare anche con protocolli FASST, HoTT, Jeti EX, e a breve JR DMSS) oppure su Pc collegandolo tramite il solito adattatore Usb (non incluso nella confezione) ed un cavo a Y fornito con il sensore GPOS II. Funziona con voltaggi da 4.0V –a 9.0V ed assorbe massimo 60mA. Dimensioni 58 x 18 x 17 mm e 14g di peso.
A cosa serve
L’installazione a bordo di un sensore Gps consente (oltre a fornire i dati già elencati) in primis ad ottimizzare l’intervento del giroscopio in relazione alla velocità del modello. Abbiamo prima accennato alla diversità di comportamenti di un giroscopio a velocità basse e alte: nel primo caso il giroscopio dovrà “lavorare” di più sui comandi per compensare eventuali spostamenti sui tre assi del modello; nel secondo caso (velocità alta) l’intervento sui servocomandi dovrà essere ridotto per non incorrere in oscillazioni indesiderate.
Come è fatto
Il modulo GPS II di Powerbox è un'unità molto compatta con un led integrato che fornisce le informazioni sullo stato del ricevitore. La sua installazione sul modello è semplice (può essere rivolo verso l’alto o di lato) con l’unica accortezza di non posizionarlo in aree schermate da carbonio o metallo riflettenti le onde radio.
E 'possibile impostare allarmi e altri parametri mediante l'interfaccia Usb PowerBox e il programma (lo stesso Powerbox Terminal che abbiamo già visto prima) con la quale è possibile anche effettuare l’aggiornamento software. Il sensore GPS II è ottimizzato per il rilevamento della velocità che consente in accoppiata con l’iGyro di avere risposte rapide nel controllo del guadagno. Se occorre è possibile ottimizzarlo per altri usi (posizione, altitudine ecc.). Con un po’ di pratica sul Terminal Powerbox è possibile adattarlo ad ogni esigenza. Può essere utilizzata anche una prolunga con estensione massima di 2 metri. Il collegamento alla Rx avviene tramite il canale telemetria della ricevente (M-link, S-BUS 2, Jeti EXT, Graupnet HoTT, JR su Sens.) Il processo di riconoscimento dei satelliti avviene in 30/60 secondi: lo stato viene monitorato dal led verde flash=ricerca satelliti, led fisso=ready.

E’ importante ricordare che il sensore GPS II può funzionare sia come sensore per regolare il guadagno dell’iGyro 3e in funzione della velocità, sia come sensore telemetrico tradizionale che tramite la telemetria ci fornirà i tradizionali dati come velocità, altitudine, distanza ecc. Come accennato prima se si utilizza il GPS II come sensore telemetrico dovrà essere collegato alla presa di telemetria della Rx. Se invece si vorrà utilizzare come sensore per ottimizzare il guadagno dell’iGyro 3e in funzione della velocità, esso dovrà essere connesso all’iGyro 3e tramite la porta MISC.
Da evidenziare, inoltre, che il sensore GPS II di Powerbox di fabbrica è settato per funzionare con telemetria M-Link. Per utilizzare protocolli diversi si dovrà settare tramite Pc e interfaccia USB utilizzando il software “Powerbox Terminal”.
https://www.baronerosso.it/modellismo_recensioni_utenti/show/1426/igyro-3e-powerbox.html