https://www.baronerosso.it/modellismo_recensioni/show/1197/phantom-by-dji-innovations.html
Introduzione
Il Phantom utilizzato in questa prova è stato gentilmente fornito dalla DJI Innovations.

| Caratteristiche tecniche: | |
| Lunghezza | 350 mm |
| Larghezza | 350 mm |
| Altezza da Terra | 190 mm |
| Peso in odv | <1000 gr |
| Impianto Radio | 2.4 GHz |
| Motori | 4 brushless |
| Eliche | 8x4.5 (2 sinistre e 2 destre) |
| Batteria | 3S1P da 2200mAh 20C |
| Produttore | DJI Innovations |
| Modello in Prova: | |
| Peso in odv | 810 gr (930 gr con supporto + GoPro) |
| Firmware version | 4.0 |
Senza dubbio i multirotori RC sono stati l’unica vera novità nel nostro campo negli ultimi anni. Tecnologicamente impensabili fino a 5-10 anni fa se non in ambito militare, oggi ne esistono di tutte le forme e dimensioni, dai piccoli da 10cm da usare in casa (ed incredibilmente all’aperto) fino ai più grossi dedicati agli ambiti professionali.

Dotato di tutti gli ultimi automatismi ed un software particolarmente evoluto, il Phantom è pensato per chi vuole avvicinarsi al settore dei multirotori con un prodotto finito e pronto all’uso, il kit proposto da DJI è infatti completo di tutto quanto è necessario per aprire la confezione ed andare a volare sul campo senza troppe complicazioni.
Il Naza-M

L’elettronica Naza-M contenuta all'interno del Phantom è dotata di diversi sensori (accelerometri e bussole elettroniche) oltre al modulo GPS, questi permettono al nostro quadricottero di ottenere una elevata stabilizzazione di volo ed automatismi come il mantenimento della posizione, la stabilizzazione automatica (basta lasciare gli stick), il ritorno a casa e l’atterraggio automatico in caso di perdita di segnale o problemi e l’IOC (vedete pragrafo successivo) oltre a tutta una serie di sicurezze come lo stato di carica delle batterie, l’accensione e lo spegnimento dei motori, il limite di altezza e di inclinazione del modello in volo.
Se il tutto vi sembra eccessivamente complicato vi assicuriamo che in realtà è possibile programmare il tutto in maniera relativamente semplice tramite il collegamento ad un PC ed il software di configurazione che potete scaricare dal sito.
IOC
Intelligent Orientation Control abbreviato IOC è una funzione particolare che vi permette di modificare la reazione del modello rispetto alla vostra posizione ed ai vostri stick, osservate l’immagine qui sotto.
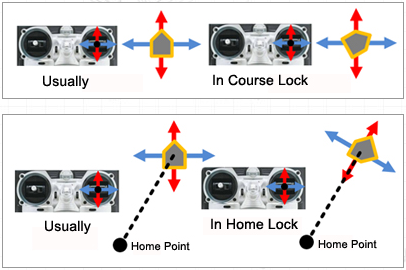
In pratica al decollo il nostro Phantom prende come riferimento la nostra posizione, una volta in volo ed attivato lo IOC il Phantom, in qualunque posizione lui si trovi, reagirà ai comandi degli stick prendendo noi come riferimento, ad esempio se si trova con il muso verso di noi il comando per andare indietro sarà sempre lo stesso e non invertito come sui modelli tradizionali.
La Scatola

All’interno della scatola troviamo il nostro Phantom già premontato, il radiocomando a 2.4GHz, un pacco batteria al litio 3S1C da 2200mAh e 20C di scarica, il supporto per la GoPro, un caricabatteria a 220Volt, 4 coppie di eliche, un cavo usb ed una chiave per smontare le eliche.
Nella confezione non è presente alcun manuale ma si viene rimandati al sito ufficiale della DJI dove è possibile trovarne l’ultima versione, una volta scaricato vi invitiamo a leggerlo con molta attenzione per capire a fondo il funzionamento del Phantom, nel complesso risulta decisamente ben fatto con molti consigli e chiarimenti, l'unico neo è che purtroppo risulta realizzato unicamente in lingua inglese.
Phantom
Rinchiuso in un guscio di plastica bianca in configurazione ad X di dimensioni 350 x 350mm per un peso di circa 800gr, il Phantom cela al suo interno una elettronica Naza M completa di sensori e GPS, 4 regolatori di giri e 4 brushless.
La parte superiore del modello ospita i 4 mtoori alle estremità dei bracci, mentre sotto troviamo 4 strisce di led, 2 rosse e 2 verdi, che ci aiutano in volo a capire la parte frontale e posteriore, visto che essendo perfettamente simmetrico a distanza potrebbe risultare poco chiaro, inoltre sempre sulla parte posteriore è presente il led di stato che ci informa di eventuali anomalie (stato GPS, carica batterie ecc.) o configurazioni di volo (GPS attivo, volo manuale, ecc.).

Sempre sotto c’è il fissaggio del supporto della GoPro. Il supporto permette unicamente l’inclinazione verticale ed è a misura esatta delle GoPro quindi in caso di utilizzo di altre camere sarà necessario lavorare un po’ per trovare un metodo di fissaggio.
Il fissaggio della camera risulta comunque troppo rigido e durante il test di volo abbiamo sofferto del classico effetto gelatina (lo potete vedere nel nostro video), volendo migliorare la qualità dei video è il caso di usare un supporto ammortizzato, in più il nostro Phantom permette di usare un gimbal, un supporto motorizzato e stabilizzato per le camere regolabile tramite un canale del radiocomando.

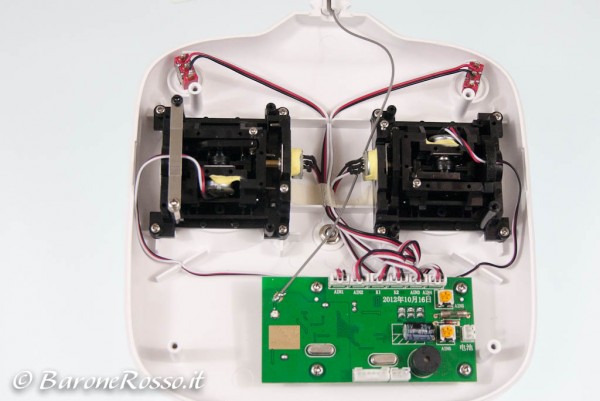
Svitando poco meno di una ventina di viti possiamo rimuovere il guscio superiore ed accedere all’elettronica contenuta all'interno della scocca, possiamo osservare che tutto l'assemblaggio risulta ben ordinato e facilmente accessibile per una facile manutenzione, al centro del modello troviamo il modulo di controllo principale, mentre nei bracci sono presenti i regolatori di giri. Sul guscio superiore sotto la schermatura è presente il modulo GPS.
Il vano batterie chiuso da uno sportellino si trova sul lato della scocca ed all'interno trova posto anche il collegamento USB necessario per regolare ed aggiornare il software del nostro quadricottero.
Il Radiocomando
Realizzato nella stessa plastica bianca del Phantom e funzionante in tecnologia a 2.4GHz, è un classico radiocomando a 7 canali, 4 stick, 2 interruttori, ed un potenziometro nella parte posteriore (da attivare tramite un accessorio opzionale) per il gimball della telecamera. Piccola curiosità: sul radiocomando non sono presenti alcun trim, sarà elettronica a rendere neutro il nostro Phantom.

La radio ci è stata fornita in mode2, se avete necessità di cambiarlo la procedura richiede solo una decina di minuti, occorre aprire il coperchio posteriore svitando le 4 viti, spostare se necessario la molla da uno stick all’altro (già che ci siamo possiamo anche regolare la durezza delle molle secondo i nostri gusti), quindi spostare le relative spinette, ed infine rifare la calibrazione delle corse tramite il software dopo aver attaccato il Phantom al PC.
Sulla parte frontale troviamo il led che ci informa dello stato di carica delle 4 stilo a secco o ricaricabili, necessarie ad alimentare l’apparato.
Batteria e Caricabatteria
Il pacco batteria fornito da 2200mAh si è dimostrato sufficiente per un volo di circa 10-13 minuti (senza peso aggiuntivo), purtroppo lo spazio a disposizione non permette di montare internamente batterie di capacità superiore, su quelle misure probabilmente si trovano dei pacchi sui 2400/2500mAh, nel caso voleste aumentare l’autonomia di volo potreste provare con pacchi di qualità e scarica superiore oppure ricorre a dei supporti esterni dove agganciare 2 pacchi in parallelo.
Per ricaricare il pacco potete usare il piccolo caricabatteria fornito nella confezione, funzionante a 100-220Volt permette di ricaricare e bilanciare pacchi LiPo e LiFe con correnti selezionabili da 1, 2 e 3 ampere.

Il Software
Un multirotore essenzialmente è un mattone che vola grazie all’azione dei motori, più o meno come avviene con un elicottero, solo che a differenza di quest’ultimo non viene controllato tramite l’inclinazione delle pale ma grazie alla variazione di giri dei motori alle sue estremità, i quali per contrastare l'effetto giroscopico girano 2 a 2 contrapposti.
Per far funzionare il tutto occorre che il piccolo computer a bordo del nostro modello si prenda l’onere di controllare i motori grazie ai valori registrati dai sensori di bordo ed ovviamente miscelandoli con le nostre richieste inviate tramite il radiocomando. Di tutto questo se ne occupa il software all'interno del Phantom.
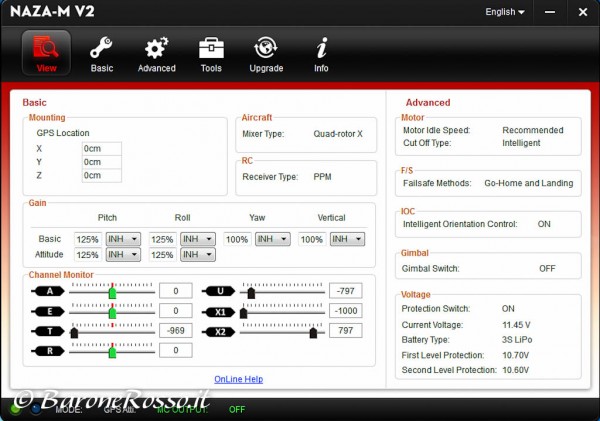
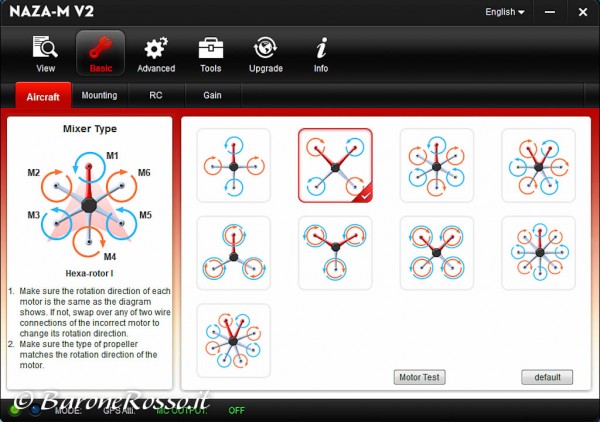
Sul sito DJI potete scaricare il software di calibrazione, settaggio ed aggiornamente del Phantom, disponibile solo per ambiente Windows (Xp, 7 o 8), vi permette di regolare al meglio e secondo i vostri gusti i parametri di funzionamento e reazione del vostro quadricottero.
Una volta installato sul computer occorre collegare il Phantom tramite il cavo USB (per motivi di sicurezza vi consigliamo sempre di rimuovere tutte le eliche), accendere la trasmittente e collegare il pacco batterie, il software riconoscerà il nostro Phantom e nel caso fosse disponibile, vi suggerirà di aggiornare il firmware interno.
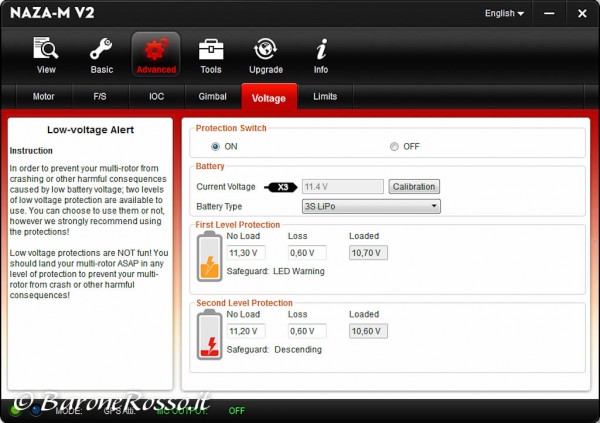
Le varie finestre vi permettono di regolare molti parametri del software di funzionamento, tra cui vi ricordiamo la calibrazione degli stick nel caso usiate un mode differente da quello fornito di scatola, la calibrazione del voltaggio del pacco batteria (da fare con un buon tester) e quella dei GPS, oltre al funzionamento degli interruttori.
Come avrete intuito in questo articolo non riusciremmo di certo illustrarvi tutte le funzioni della programmazione del Phantom , per la quale vi rimandiamo all’ottimo ed esaustivo manuale.
In Volo

Come anticipato grazie all'alto livello di preassemblaggio del Phantom per andare in volo sono necessarie solo poche operazioni: ricaricare il pacco batteria tramite il caricabatteria in dotazione, montare il carrello, collegare la bussola elettronica, fissare le 4 eliche facendo molta attenzione alla direzione di rotazione, mettere 4 stilo nel radiocomando e, siprattutto, recarsi al campo e volare.
Tecnicamente non avete bisogno di altro ma noi vi consigliamo di aggiornare il firmware del sistema tramite il collegamento al PC, dato che spesso e volentieri i nuovi software garantiscono una migliore stabilità di funzionamento.
Una volta messo a terra il Phantom, accendete la trasmittente, attaccate il pacco batteria ed aspettate una ventina di secondi senza toccare il modello per permettere ai vari sensori di stabilizzarsi ed azzerarsi, oltre a far agganciare i satelliti al GPS.
A questo punto possiamo avviare i motori. Per sicurezza esiste una apposita procedura che avvia e spegne i motori: non basta cioè dare direttamente gas ma occorre spostare entrambi gli stick in una determinata posizione per un paio di secondi, questa procedura evita qualunque accensione accidentale pericolosa (ci sembra una nota positiva, dopotutto stiamo sempre giocando con 4 o più motori da diversi watt di potenza).

Una volta avviati i motori possiamo iniziare a dare gas ed il nostro Phantom si alzerà in verticale. A questo punto abbiamo 3 possibilità di volo selezionabili tramite l’interruttore alla nostra destra:
-
Stabilizzazione + GPS, è la modalità più stabile di volo, in pratica grazie all’assistenza del punto GPS e dei sensori il Phantom rimane livellato e stabile alla quota a cui lo lasciamo con un errore di un paio di metri in orizzontale ed uno in verticale.
In questa condizione il modello è autostabilizzante, quindi se mentre state volando lasciate gli stick in qualunque posizione si trovi si fermerà in volo livellato stazionario in quel punto, inoltre sono attive alcune limitazioni come l’inclinazione massima di 35°. - Stabilizzazione, simile alla precedente ma senza l’ausilio del punto GPS, in pratica il modello mantiene la quota verticale ma non la posizione orizzontale, quindi se c’è vento traslerà spinto dalla sua forza.
- Manuale, nella terza possibilità è dato al pilota il quasi controllo totale del Phantom, non c’è più l’auto stabilizzazione quindi lasciando gli stick non si rimette in posizione orizzontale ma dobbiamo essere noi a farlo, i motori diventa più reattivi e viene spostato a 150° il limite di inclinazione, consideratela la modalità acrobatica del vostro Phantom.

In Volo - 2
Nelle prime 2 configurazioni il Phantom è decisamente stabile, anche provando a far oscillare lo stick lo vedrete solo vibrare sulla sua posizione, mentre insistendo in una posizione traslerà lateralmente senza mai raggiungere situazioni potenzialmente pericolose.
Diciamo che si tratta di un volo simile a quello di un elicottero con l’heading lock attivo, in pratica dovete accompagnare il suo movimento in ogni situazione, se poi nel malaugurato caso abbiate problemi dovete semplicemente lasciare lo stick e lui si stabilizzerà automaticamente. Allontanadosi un po' la forma del Phantom non aiuta molto durante il volo, essendo perfettamente simmetrico risulta a volte poco chiaro il suo assetto, qui vi vengono in aiuto sia i led sotto al modello, anche se con molta luce ambientale non si vedono benissimo, sia l’attivazione della funzione IOC descritta prima tramite l’interruttore a sinistra.

Passando al volo manuale il nostro Phantom inizia ad essere davvero divertente. Diremmo che volendo fare un paragone automobilistico è come disattivare buona parte dei sistemi di antipattinamento, ABS ecc. Il modello in questo caso diventa molto reattivo rispondendo ad ogni nostro comando velocemente permettendoci un minimo di volo acrobatico. Se poi avessimo un problema basterà spostare al volo l’interruttore su una delle 2 fasi di volo stabilizzate e lui si fermerà a mezzaria in attesa di un nostro comando.
L’atterraggio è ovviamente routine, si abbassa gradualmente il gas, fino a quando si appoggia terra e dopo qualche secondo i motori si spengono da soli. Sul Phantom sono presenti anche alcuni automatismi di volo come ad esempio la funzione FailSafe e GoHome, attivabili con l’interruttore a destra o automaticamente in caso di mancanza di segnale della trasmittente, il Phantom si porterà fino ad una quota di 20mt da terra, si muoverà fino alla posizione di partenza ed atterrerà con dolcezza spegnendo subito dopo i motori.

Conclusioni

Siamo quindi giunti alla conclusione di questa prova. Se la fatidica domanda è: vale la pena acquistare un multirotore? La mia risposta è "dipende da quali sono i vostri interessi". Personalmente sono sempre rimasto affascinato da tutto ciò che vola: oltre venti anni fa passai dagli aerei agli elicotteri quando gli elicotteristi sui campi di volo li contavi su una mano (neanche ben visti con quei frullatori volanti) ed i giroscopi meccanici ronzavano in avvio collegati ad un Futaba S148 che non sapeva neppure come era fatto un cuscinetto.
Oggi gli elicotteri sono comuni su tutti campi, evoluti all’inverosimile meccanicamente e tecnologicamente, e con tutta probabilità questa sarà la stessa strada che percorreranno i multirotori.

Nel complesso il kit proposto da DJI Innovations è completo e perfettamente equilibrato, il Phantom è un ottimo prodotto, stabile e funzionale, ed anche se può mettere paura tutta la tecnologia che c’è alle sue spalle vi possiamo assicurare che la messa punto non è affatto complicata ed una volta assimilata, il vostro Phantom vi regalerà certamente grandi soddisfazioni.
https://www.baronerosso.it/modellismo_recensioni/show/1197/phantom-by-dji-innovations.html