Basato sull’elettronica IFLY-V4M della IdeaFlyl’Apollo è un quadricottero radiocomandato RTF dall’aspetto diverso dal solito ma, come altri prodotti presenti sul mercato, dotato di 4 motori brushless, 4 eliche in carbonio, GPS e sensori vari.
La struttura realizzata in plastica bianca e nera (ma presto saranno disponibili anche le colorazione rosso, nero, giallo e azzurro) ricorda nelle forme un aeroplano visto in qualche film o anime futuristico. La configurazione di volo è di tipo ad X, di dimensioni 280x310mm (quindi non perfettamente quadrato), sulla parte superiore sono presenti una bella presa d’aria per il raffreddamento dei regolatori e, su un apposito supporto, il sensore del GPS.
Sotto al modello lungo i bracci troviamo i 2 led colorati che ci indicano la direzione, il led di servizio ad alta luminosità che ci fornisce indicazioni sullo stato del sistema, 2 serie di supporti per agganciare il gimball e 4 connettori, 2 per i servocomandi del gimball e gli altri 2 senza alcuna indicazione (probabilmente si riferiscono alla versione con trasmettitore video che non viene importata in Italia).
La batteria è inserita a pressione in un apposito vano posteriore dove sono presenti l’antenna ed il connettore USB per la programmazione del sistema.
Le eliche montate sul modello sono realizzate in carbonio (appena 4 gr di peso) e si fissano direttamente ai motori tramite 2 viti a brugola (l’ogiva bianca è solo decorativa). Purtroppo non è riportata alcuna informazione sulla loro misura, il diametro misura 8 pollici, mentre il passo sembrerebbe un 5 o forse un 6.
Ce l'ho io,è un regalo di mio padre e la mia prima esperienza con un drone..costa un botto e nemmeno i paraeliche incluse nella confezione.Da guidare è instabile,gimbal disallineato,manuale striminzito...soldi buttati
Inviato dal mio iPhone utilizzando Tapatalk
Commento postato da Mozart wrx il 25 April 2016 alle 21:27
non un gran che come modello.. infatti è scritto anche in questa recensione..
poco affidabile e difficile da pilotare.. servono modifiche sostanziali per renderlo piacevole
Commento postato da greg89 il 23 January 2015 alle 11:46
salve, mi e' capitato tra le mani questo Apollo della ideafly, non vedo il proseguo della discussione, ma non l'ha comperato nessuno, oppure vola da solo,nessuna esperienza?
Commento postato da giarinet il 22 January 2015 alle 15:22
La prima volta che abbiamo visto l'Apollo sul web non vedevamo l'ora di acquistarne uno e provarlo, dato che sembrava un quadricottero estremamente attraente.
Sfortunatamente, sin dai primi voli, questo piccolo multirotore non ha esattamente soddisfatto le nostre aspettative.
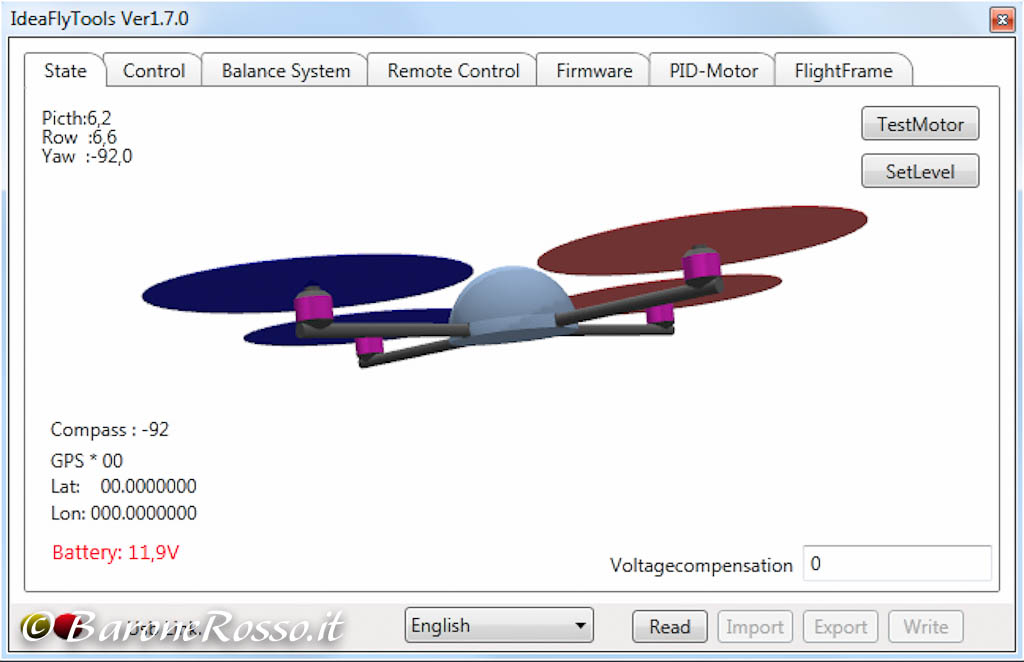
In modalita' GPS il modello sembrava comportarsi in maniera goffa, quando addirittura non sembrava perdere improvvisamente e senza preavviso l'orientamento - ad esempio iniziando un drift verso una direzione casuale - cosicche' eravamo costretti a passare immediatamente in modalita' Balance & Altitude per poter volare con maggior sicurezza.
Il gimbal motorizzato fornito con il modello e' di plastica non molto rigida, e non siamo riusciti a regolarlo in manier da avere riprese video stabili; inoltre il peso extra del gimbal, dei piloni di atterraggio e di una videocamera Sony HDR AS30V sembrava portare il quadrirotore della Ideafly al limite, rendendo difficile un volo prolungato (intendendo con 'prolungato' un tempo superiore a 5') con le batterie 3S 2200mAh di serie - batterie con maggior capacita' non possono essere inserite nel vano di accesso - e rendendo impossibile l'eleiminazione delle vibrazioni del video.
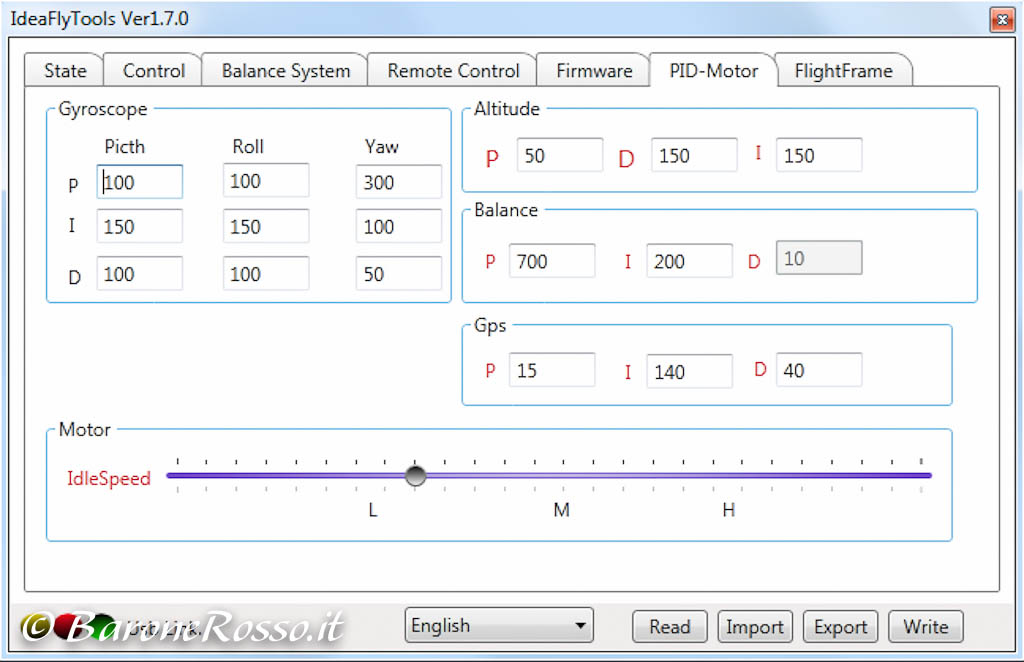
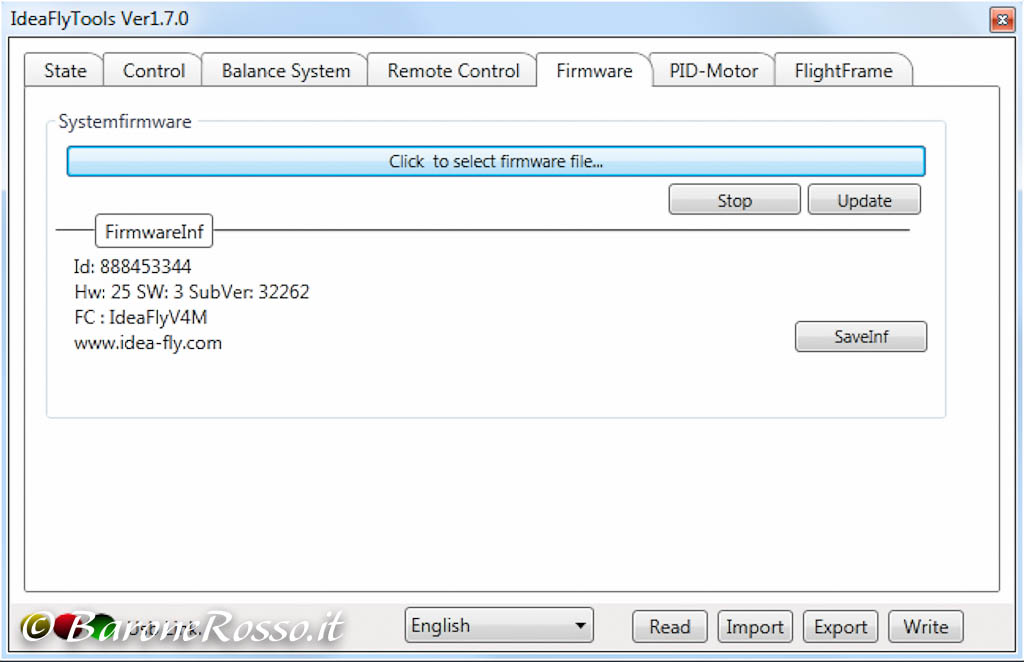
Certamente la traduzione in inglese dei manuali e' di bassa qualita' (rispetto a quella disponibile ad esempio per modelli di altri costruttori e della stessa categoria) - nopnostante meriti di essere evidenziato come l'importatore italiano Maximo abbia fatto un notevole sforzo per rendere chiara la traduzione italiana dei manuali - traduzione che purtroppo non include i dettagli del software di configurazione del flight controller Ideafly V4M.
Alla fine dei conti, eravamo proprio delusi dall'Apollo di Ideafly.
D'altra parte questo quad ha rappresentato un investimento non indifferente (e' venduto intorno ai 460 Euro in Italia, alla luce della nostra esperienza un prezzo piuttosto elevato), cosi' abbiamo deciso che non sarebbe andato a finire in un angolo della cantina.
Abbiamo iniziato a pensare a come riconvertire questa piccola macchina in un modello divertente: l'aspetto esetetico e' considerevole, ed in effetti attira sempre l'attenzione degli spettatori casuali ogni volta che usciamo per i nostri voli. Inoltre di serie monta dei LED che ne rendono l'aspetto ancora piu' accattivante.
Avevamo a disposizione un po' di elettronica per multirotore di riserva e cosi' abbiamo deciso di tentare di cavare qualcosa di buono dalla riconversione del modello.
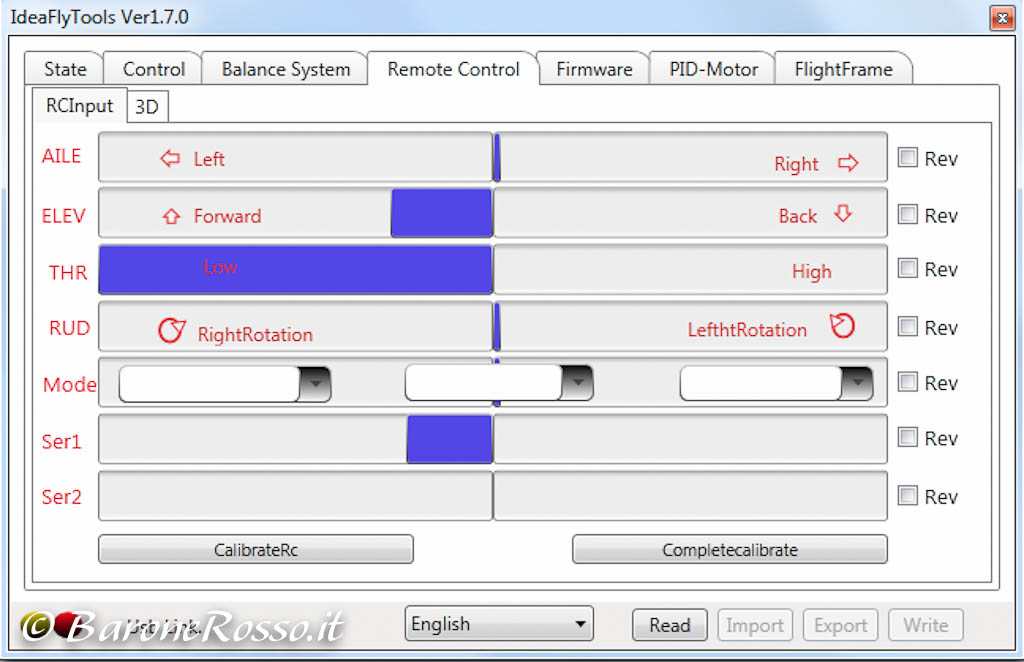
Poiche' la radio fornita nel kit RTF e' un modello a 6 canali abbastanza di base, abbiamo anche optato per un consolidamente della componente radio.
Di seguito le linee guida per il nostro progetto:
- rimpiazzare il flight controller Ideafly V4M con un DJI Naza M-Lite + GPS, un FC che abbiamo testato ormai da diverso tempo e del quale conosciamo abbastanza bene le caratteristiche.
- abilitare la telemetria, per monitorare costantemente i livelli batteria e la posizione GPS del modello.
- cercare un modo per ricavare spazio per batterie di capacita' maggiore di 2200mAh.
- forniore il nostro Apollo di equipaggiamento FPV.
Quella che segue e' la storia del nostgro progetto di riconversione dell'Apollo.
Alcune soprese e preoccupazioni iniziali
Per prima cosa abbiamo aperto la scocca autoportante, rimuovendo almeno 30 viti per accedere all'interno. E' apparso chiaro sin dall'inizio che lo spazio interno era molto limitato, limitando le nostre opzioni di posizionarvi ulteriori componenti.
Abbiamo riscontrato anche un paio di brutte sorprese. Uno dei cavi ESC posizionato nel braccio anteriore sinistro era esposto, dalla posizione del danno probabilmente l'isolante e' stato tranciato quando la scocca e' stata chiusa in fabbrica. In secondo luogo, il flight controller Ideafli V4M era chiaramente posizionato disallineato rispetto all'asse di simmetria del velivolo: probabilmente questo difetto di assemblaggio era almeno in parte responsabile del comportamente erratico osservato a volte in modalita' GPS.
In ogni caso e' nostra ferma convinzione che i due difetti riscontrati non siano qualitativamente accettabili in un multirotore RTF della fascia di prezzo dell'Apollo.
Al lavoro! - Taglia e cuci
Dal Flight controller V4M sono stati disconnessi il LED, il GPS, gli ESC e la ricevente (non e' stato facile aver ragione del nastro biadesivo che fissava il V4M alla piastra madre), e abbiamo rimosso l'unita' GPS. Anche la ricevente di serie e' stata asportata.
Il cavo ESC danneggiato e' stato isolato e tenuto in posizione con colla a caldo. Il connettore Deans dell'alimentazione principale e' stato sostituito con un XT60. Sono stati saldati all'alimentazione principale le linee di alimentazione del Naza e un connettore JST aggiuntivo che servira' successivamente per l'alimentazione del sistema FPV. Le saldature sono state quindi isolate con colla a caldo.
Il retro della scocca e' stato opportunamente tagliato e rimosso per consentire l'inserimento di batterie piu' grandi, fino a 3S 4000mAh. Altri tagli sono stati praticati nella scocca superiore per consentire il passaggio di cavi che connettono l'elettronica esterna con quella interna.
Infine, i connettori inferiori originali per il gimbal di serie sono stati tagliati via e la superficie inferiore della scocca e' stata resa liscia.
Operazione a cuore aperto - sostituzione dell'elettronica
Un flight controller DJI Naza M-Lite ha rimpiazzato l'originale Ideafly V4M; il dome GPS del Naza e' stato installato al posto dell'originale Ideafly. Accanto alla scheda madre dell'Apollo e' stata installata una ricevente telemetrica FrSKY X8R e le antenne dipolari sono state fissate esternamente alla superficie inferiore della scocca.
I connettori ESC originali sono stati riutilizzati e collegati al Naza, mentre la ricevente X8R e' stata collegata al flight controller con un unico cavo USB, riducendo considerevolmente la matassa di cablaggi all'interno dell'Apollo.
Accessori e telemetria
Abbiamo ritenuto che fosse fondamentale monitorare i dati GPS e dei livelli delle celle LiPo, cosi' degli appositi sensori telemetrici FrSKY sono stati fissati alla scocca esterna superiore.
Nel frattempo, abbiamo ritenuto anche che il nostro Apollo meritasse qualche 'tatuaggio' per apparire piu' attraente ;)
L'evoluzione all'opera - Apollo + FPV
Abbiamo riutilizzato sull'Apollo l'equipaggiamento FPV che utilizziamo su altri aeromodelli. Una videocamera FatShark PilotHD e' stata installata sulla scocca frontale superiore, fissata con nastro dual lock 3M. Una trasmittente A/V ImmersionRC e' stata fissata allo stesso modo al picolo impennaggio verticale posteriore - finalmente abbiamo trovato unn utilizzo per questo elemento caratteristico della linea dell'Apollo ;)
Un UBEC 12V/4.5A e' stato fissato alla scocca superiore, poiche' la trasmittente A/V e' alimentata direttamente dalla batteria principale.
La configurazione finale del nostro Apollo
- Scocca, ESCs, motori, scheda madre e LED di posizione originali dal kit RTF Ideafly.
- Eliche in plastica 8'x4.5 (rimpiazzano le eliche originali in fibra di carbonio).
- Flight controller DJI Naza M-Lite.
- Ricevente SBUS FrSKY X8R.
- Sensore LiPo SBUS FrSKY.
- Sensore GPS SBUS FrSKY.
- Trasmittente A/V ImmersionRC 5.8GHz.
- Videocamenra FPV FatShark PilotHD.
- UBEC HobbyKing X12 12V/4.5A.
Peso complessivo: 802g.
Peso massimo al decollo dichiarato dal costruttore (MTOW): 1200g.
Peso al decollo con batteria LiPo Zippy Compact 2200mAh 3S 35C: 991g (82.6% MTOW).
Peso al decollo con batteria LiPo Zippy Compact 4000mAh 3S 25C: 1107g (92.3% MTOW).
Valore throttle per hovering (sperimentata sul campo): 50%-55%.
Allarme voltaggio cella LiPo: <3.7V (allarme impostato sulla radio FrSKY Taranis).
Tempo di volo misto (sperimentato sul campo - con rientro immediato al valore allarme voltaggio cella LiPo):
- circa 5' con batteria 2200mAh.
- circa 11' con batteria 4400mAh.
Commento postato da droniroma il 29 May 2014 alle 12:52
Dal 1998 BaroneRosso.it costituisce una delle più grandi community di modellismo in Italia
soprattutto grazie al contributo di tanti appassionati che anno dopo anno hanno saputo arrichire questa
straordinaria risorsa collettiva. Eccovi una semplice mappa delle risorse a vostra disposizone.