 Modellismo
Modellismo
 |
| |
 26 ottobre 24, 07:15
26 ottobre 24, 07:15
| #1 (permalink) Top |
| User Data registr.: 10-04-2015 Residenza: Napoli
Messaggi: 43
| OMP M4 -> OMP ESC -> Brain2 Governor
Buongiorno a tutti del forum, dopo le info ricevute nei post precedenti e dopo: 0) Montaggio elicottero 1) Setup ESC per governor esterno 2) Setup Brain2 base by Wizard 3) Setup radio Radiomaster by wizard Brain2 4) Riverifica e cambio valori Brain2 secondo datasheet di Jonas Ho provveduto accendere il motore dell'elicottero senza pale e palini per vedere se tutto era ok e ho riscontrato le seguenti cose che non so se è normale: 1) Quando avvio in Normal, il motore parte dopo circa 10 sec 2) Poichè è attivo il Governor con tre velocità ho un effetto che non so se è normale ossia la velocità del rotore raggiunge la velocità di rotazione e poi inizia a variare a singhiozzo tant'è che la coda scodinzola inizialmente di brutto poi man mano si riducono queste variazioni. In modalità IdleUp1 non si vedono differenze di velocità ossia non si porta alla velocità impostata anche se diventa verde il setup. In modalità Idleup2 c'è un aumento elevato di giri ma riparte lo scodinzolamento e il singhiozzo. La velocità si porta al valore impostato In passato, con lo stesso Hely e un'altra centralina con ESC (quest'ultimo in modo Hely-Gov) e con la radio impostata con curve dritte ossia con valore fisso secondo tabelle manuale, c'era solo lo scatto iniziale e poi finiva li e la velocità rimaneva costante e la velocità cambiava tra normal e idleup1 e tra quest'ultima e idleup2 senza strappi. Allego una registrazione di log, graficamente sembra che i valori provenienti dal esc sono come ballerini e di conseguenza (credo) anche la risposta del Brain 2 è repentino. Ho controllato le letture con il SW del Brain e l'Idleup2, sebbene si attiva, il visualizzatore di giri rimane pressocchè uguale (ballerino ma uguale) Mi sono perso qualcosa ? Questa è la prima volta che uso il governor gestito dalla centralina e non dal ESC quindi scusatemi se chiedo se è normale il funzionamento. Con gli eli ho imparato che prima di metterlo in volo bisogna controllarlo certosinamente. Una nota che la dico è quella della centralina che non è ancora fissata con il biadesivo ma è ancorata con fascette ed è ferma, anche in passato ho provato senza pale e fissando la centralina ben salda alla base con fascette senza problemi. Grazie per la pazienza e per aver letto, ancor di più se mi potete aiutare. Saluti cnesan |

|  |
|
28 ottobre 24, 07:14
| #2 (permalink) Top |
| User Data registr.: 28-06-2005 Residenza: Milano
Messaggi: 2.682
|
Come è noto, non possono essere usati contemporaneamente due governor perché andrebbero in conflitto tra loro e quando un governor cerca di aumentare gli RPM del motore l’altro governor cercherà di ridurli creando forti oscillazioni degli RPM che si ripercuoterebbero sul rotore anticopia di coda causando oscillazioni della coda. Nel Real time log che hai inviato sono presenti le oscillazioni degli RPM di cui parlo. 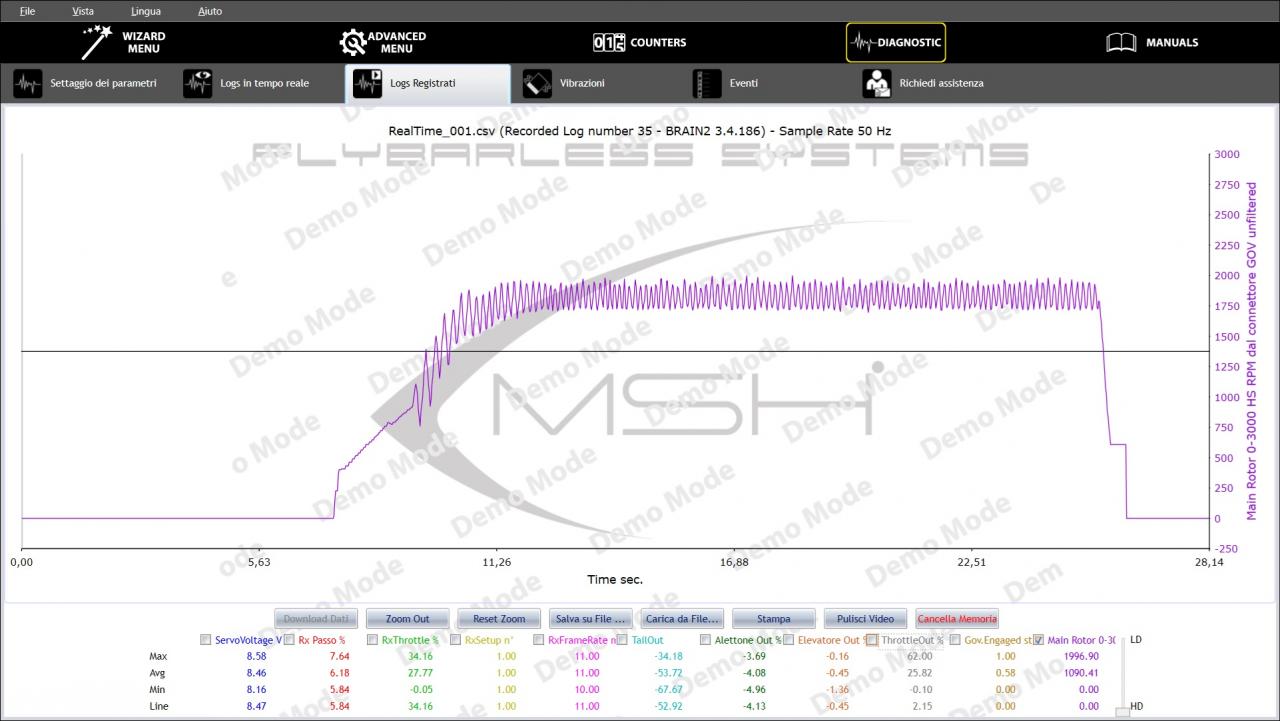 Se vuoi usare il governor della centralina di volo, non puoi usare contemporaneamente anche il governor dell’ESC che devi disattivare configurando l’ESC in modalità aeroplano. Ovviamente, affinché il segnale del Throttle inviato all’ESC risulti avere un escursione corretta, e non ci siano tempi morti all’avvio o partenze troppo rapide, bisognerà regolare nella trasmittente l’escursione del segnale del Throttle in modo che il segnale in ingresso alla centralina di volo visualizzato nel pannello 5 del Wizard vada da 0% a 100% senza che vengano tramessi valori inferiori (negativi) o maggiori del 100% (come spiegato nelle istruzioni laterali del pannello 5) e nel pannello 12 del Wizard dovranno essere regolati i valori Out MIN e Out MAX in modo che il segnale del Throttle in uscita dalla centralina di volo ed inviato all’ESC abbia l’escursione prevista ed attesa dall’ESC come spiegato nelle istruzioni laterali del pannello 12. Nel tuo lungo post hai detto tutto tranne la marca e modello del tuo ESC ma comunque nelle istruzioni laterali del pannello 12 del wizard trovi i valori da usare con le varie marche di ESC. Ti ricordo che queste regolazioni vanno fatte senza pale e possibilmente con il pignone del motore sganciato dalla corona oppure con due cavi del motore scollegati per evitare il rischio di farti male. Infine, affinché il governor della centralina di volo funzioni correttamente i valori dei divisori (“Impulsi Per Rotazione” e “Rapporto di riduzione rotore principale”) devono essere quelli giusti in modo che la centralina di volo legga i valori corretti e reali della velocità di rotazione del rotore principale.
__________________ www.msh-electronics.com |
|
| |
|
28 ottobre 24, 20:45
| #3 (permalink) Top |
| User Data registr.: 10-04-2015 Residenza: Napoli
Messaggi: 43
|
Grazie per la risposta. Il modello del ESC posso dire solo che è della OMP ed è di 65A in quanto è uscito dalla confezione del "OMP M4 Super combo" quindi completo. La confezione dell'M4 si presenta con: -Meccanica OMP -Servi marchiati OMP -Pale Rotortech 385 -Palini OMP -Motore SunnySky (a ciambella ossia l'asse del rotore va nell'asse del motore) -ESC OMP Presi con l'elicottero anche il "LCD per la programmazione" e il "dispositivo per upgrade bluetooth" non usato ancora il quale si utilizza mediante una App su smartphone che sto scaricando. Proprio ora ho verificato se c'erano update sull'ESC e in effetti il firmware attuale dell'ESC OMP è 1.3 mentre quello rilasciato è 3.4c Dopo l'update verifico se è cambiato qualcosa sulla programmazione e metterò le differenze. Cercherò con l'occasione anche di programmarlo secondo i suggerimenti che mi hai dato. Aggiorno al più presto il post. Grazie cnesan P.S.: Io ho visto i video di Issaam. Per il setup di ISSAM in merito "al ESC con il Brain2", l'ESC che usa Issam è hobbywing che ha un menù completamente differente e articolato rispetto a quello della OMP che sembra custom per l'elicottero. Infatti in un item Issam ha Airplane / Hely, OMP ha Ext-GOV / Hely-GOV quest'ultimo di default. Ho verificato il manuale dell'esc omp come item e confrontandolo con quello che vedo con la scheda LCD gli item sono differenti come se fosse un'altro esc di un'altra casa produttrice. MA! |
|
| |
|
29 ottobre 24, 06:04
| #4 (permalink) Top |
| User Data registr.: 10-04-2015 Residenza: Napoli
Messaggi: 43
|
Buongiorno, dopo l'update al firmware del OMP M4 ESC alla versione 3.4B ho le seguenti impostazioni di default che sono state fatte per l'M4 usando il governor del ESC stesso. OMP M4 VERS. B3.4 POLE: 2 GR: 1.00 RPM_MAX: 84000 VOLTAGE_MIN: 24.3V MOS_TEMP: 33C 1: GOV MODE 1: ESC-STOGOV* 2: EXT-GOV 2: CUTOFF VOLT 1: DISABLED 2: 2.7 3: 3.0* 4: 3.2 5: 3.4 6: 3.6 7: 3.8 3: TIMING 1: AUTO* 2: LOW 3: MIDDLE 4: HIGHT 4: BEC VOLTAGE 1: 6.0 2: 7.4 3: 8.4* 5: MOTOR ROTATE 1: CW* 2: CCW 6: GOV PARAM P 2: 1 3: 2 4: 3 5: 4* 6: 5 7: 6 8: 7 9: 8 10: 9 11: 10 7: GOV PARAM I 2: 1 3: 2 4: 3 5: 4* 6: 5 7: 6 8: 7 9: 8 10: 9 11: 10 8: ACCELERATION 1: FAST 2: NORMAL 3: SLOW* 4: VERY SLOW 9: AR TIME 1: OFF 2: 90S* 10: HELY GOV TYPE 1: OTHER 2: OMP M4* 3: OMP M4 MAX Volendo fare un paragone con il video di ISSAM per far si che il governor passi al Brain: Il punto 1: GOV MODE andrebbe settato in 2: EXT-GOV Il punto 2: CUTOFF VOLT andrebbe settato 1: DISABLED Il punto 6: GOV PARAM P andrebbe settato in ? Il punto 7: GOV PARAM I andrebbe settato in ? Il punto 8: ACCELERATION andrebbe settato in 1: FAST Il punto 9: AR TIME andrebbe settato in ? Il punto 10: HELY GOV TYPE andrebbe settato in 1: OTHER Per ? intendo che non so a cosa serve o che cosa è inoltre non è riportato niente sul manuale. Inoltre non vedo Active FreeWheel citato nel'Help del SW Brain2 Nelle impostazioni del Brain avevo selezionato come Input Telemetria "Also OMP ESC Telemetry" forse qui dovevo impostare "Basic Telemetry" ? Rimango in attesa di un vostro commento. Saluti cnesan |
|
| |
|
30 ottobre 24, 07:54
| #5 (permalink) Top |
| User Data registr.: 28-06-2005 Residenza: Milano
Messaggi: 2.682
|
I parametri dei guadagni P e I del Governor dell'ESC vengono usati solo quando il governor dell’ESC è attivo (Gov mode o ESC StoGov) quando il governor dell’ESC è disattivo (Ext Gov), questi parametri non vengono utilizzati quindi possono essere lasciati sui valori che verrebbero usati dal Governor dell’ESC se fosse attivo. Lo stesso vale per il timeout dell’autorotation bailout che, quando il governor dell’ESC è disattivo, viene gestito dal governor della centralina di volo. Lo stesso vale per il discorso Freewheel, può darsi che gli ESC OMP non abbiano questa funzione oppure che questa funzione non sia disattivabile. È del tutto normale, sono due marche differenti. Ogni azienda produttrice di ESC realizza ed utilizza un suo software che è sempre diverso (molto o poco) dal software delle altre aziende / marche. È quindi del tutto normale che i parametri di funzionamento del software degli ESC HobbyWing siano differenti dai parametri di funzionamento del software degli ESC OMP. Sono due marche e due aziende totalmente differenti, separate ed indipendenti tra loro. Per quanto riguarda gli aggiornamenti del software / Firmware, con ogni nuovo aggiornamento possono essere aggiunti, tolti o modificati dei parametri di regolazione software. Chi include la documentazione nel software di configurazione ha il vantaggio che la documentazione risulta automaticamente aggiornata all’interno degli aggiornamenti del software. Con le aziende che invece forniscono la documentazione separatamente dal software, gli utenti devono farsi carico di ricordarsi ad ogni aggiornamento che devono buttare via la precedente documentazione, cercare, trovare e scaricare la nuova documentazione, decomprimerla, salvarla e stamparla. Lo stesso vale per le telemetrie, che ogni azienda realizza con formati, strutture, dati e metodi di misura differenti tra un Brand e l’altro. È quindi giusto per gli ESC OMP selezionare la decodifica dei dati trasmessi dagli ESC OMP e non quella di altre marche.
__________________ www.msh-electronics.com |
|
| |
|
30 ottobre 24, 15:58
| #6 (permalink) Top |
| User Data registr.: 10-04-2015 Residenza: Napoli
Messaggi: 43
|
OK, quindi riprendendo il setup dell'ESC dovrei impostarlo nel seguente modo: 1: GOV MODE -> 2: EXT-GOV 2: CUTOFF VOLT -> 1: DISABLED (secondo il video di ISAAM) 3: TIMING -> 1: AUTO* 4: BEC VOLTAGE -> 3: 8.4* 5: MOTOR ROTATE -> 1: CW* 8: ACCELERATION -> 3: SLOW* 9: AR TIME -> 2: 90S* 10: HELY GOV TYPE -> 1: OTHER Provo così e se non va userò il governor del'ESC e buonanotte. Grazie per la spiegazione. saluti cnesan |
|
| |
 |
| Bookmarks |
| |
 Discussioni simili
Discussioni simili | ||||
| Discussione | Autore discussione | Forum | Commenti | Ultimo Commento |
| OMP M4 ESC impostazione ESC della OMP | cnesan | Elimodellismo Elettronica | 2 | 24 ottobre 24 18:57 |
| Omp hobby M1 settaggio e regolazione | sandex | Elimodellismo Micromodelli | 1 | 10 novembre 22 10:31 |
| fusion x3d 90 (OMP) | toio!! | Aeromodellismo Volo 3D | 14 | 24 dicembre 07 13:41 |
| ultimate 10-300 OMP | toio!! | Aeromodellismo Volo 3D | 30 | 11 dicembre 07 15:39 |



 cnesan
cnesan 





 Modalità ibrido
Modalità ibrido
