
- Contenuti
- Community
- Risorse
- Varie

| |
 22 novembre 11, 16:17
22 novembre 11, 16:17
| #8701 (permalink) Top |
| UserPlus | La guida alla conversione 2S con governor - parte 1 La preparazione della 3 in 1 Premessa Questa guida descrive un tipo di conversione brushless molto efficiente e flessibile, ma comporta un'esborso finanziario che potrebbe sembrare eccessivo ai più. Ciò è dovuto all'utilizzo di un regolatore di alta qualità, senza il quale la semplicità di realizzazione di questa particolare conversione verrebbe meno. Infatti il problema principale della conversione brushless a più celle, consiste nell'alimentazione della 3 in 1, dei servi e della coda. Il regolatore Castle Creations Phoenix 10 è caratterizzato da un bec lineare in grado di erogare 3A a 5 volt con alimentazione a 2S e 3S, corrente più che sufficiente allo scopo. Tuttavia, l'esborso economico è secondo me ampiamente ripagato sia dalle prestazioni ottenibili, sia dalla grande flessibilità che permette margini di settaggio estremamente ampi, consentendo anche di preparare un mCP X calmo calmo, adatto all'apprendimendimento ma senza i noti problemi del modello stock. Materiale occorrente - regolatore Castle Creations Phoenix 10 - un diodo da 3 ampere, io ho usato un 1N5408 - il convertitore TheSteve - [opzionale ma non troppo] Castle Link USB Programming Kit - una o due coppie di connettori a tre pin - guaine termo-restringenti di varie misure - un pezzetto di plastica o vetronite o carbonio delle dimensioni del diodo Disporre il convertitore Per una serie di motivi pratici e dettati da esperienze su problemi di innesco che bloccano il convertitore, preferisco sempre posizionare il convertitore sulla 3 in 1 separato dall'esc (contrariamente ai kit plug&play). Poichè la parte anteriore sarà occupata da altri componenti, trovo molto pratico posizionare il convertitore sulla parte posteriore della 3 in 1. Nel caso specifico, è fotografata una main board modificata in modo da poter utilizzare la sezione di potenza del brushed main esc per pilotare i motori di coda. In pratica, i motori di coda, saranno collegati alla presa del motore principale. In questo modo, eliminando il connettore del motore di coda, si rendono disponibili due fori attraverso cui far passare due fili dalla faccia posteriore a quella anteriore senza dover passare esternamente (il bordo della 3 in 1 è pericolosamente tagliente, soprattutto in caso di crash). Ho quindi fatto passare il filo bianco del segnale di uscita ed il filo rosso di alimentazione del convertitore. Il filo blu è collegato a massa sulla faccia posteriore, mentre il giallo al classico resistore, in modo da avere piena escursione sul canale del gas (fondamentale per il governor). Il rosso l'ho portato davanti perché il punto dove prelevo l'alimentazione è quello che storicamente non mi ha mai dato problemi di incompatibilità ed inneschi.  Disporre il diodo Il diodo da 3A è necessario a ridurre la tensione del bec a circa 4,25 volts. In diversi hanno alimentato la 3 in 1 con i 5V del bec, ma personalmente non me la sento di consigliare una pratica rischiosa per 3 in 1, servi e motori di coda, quindi meglio interporre il diodo. Questi diodi da 3A sono piuttosto ignoranti, hanno conduttori molto rigidi e spessi, quindi ho preferito tagliarli cortissimi e saldarci morbidi pezzetti di filo con guaina in silicone (quelli della 3 in 1 che vanno alla batteria, tanto non si utilizzano più e vanno rimossi). Per facilitare il posizionamento, ho confezionato il diodo con una piccola basetta in carbonio ed ho chiuso il tutto con termoretraibile (facendo passare anche il nero dell'alimentazione).  In questo modo il biadesivo lavora bene e lo fissa come si deve.  In quest'altra immagine si vede meglio dove collego il filo rosso del TheSteve. Il filo bianco e quello nero di alimentazione vanno collegati dove erano originariamente, ma sulla faccia anteriore.  Disporre il regolatore E' la volta di preparare e fissare il regolatore. L'ho spogliato dalla guaina per sostituire i fili del bec con altri di sezione leggermente maggiore, poi l'ho richiuso. Sui fili del bec ho intestato un micro plug a tre pin femmina, mentre sui fili di alimentazione un Deans micro plug. I fili per il motore possono essere successivamente saldati a quelli del motore, oppure ad un'altro micro plug a tre poli per facilitare la disconnessione della 3 in 1.  Infine bisogna intestare il bianco ed il nero di alimentazione ed il bianco del TheSteve con un micro plug a tre poli maschio e poi fissarlo all'esc con biadesivo, in modo che non vada in giro.  In questo modo è possibile staccare l'uscita del bec per collegarla all'interfaccia usb di programmazione, previo utilizzo di un adattatore che costruirete con un micro plug a tre poli maschio. Ecco il regolatore pronto per essere programmato.  Se siete smanettoni può essere molto comodo usare un connettore a tre poli anche per il motore...   Lo schema di cablaggio. 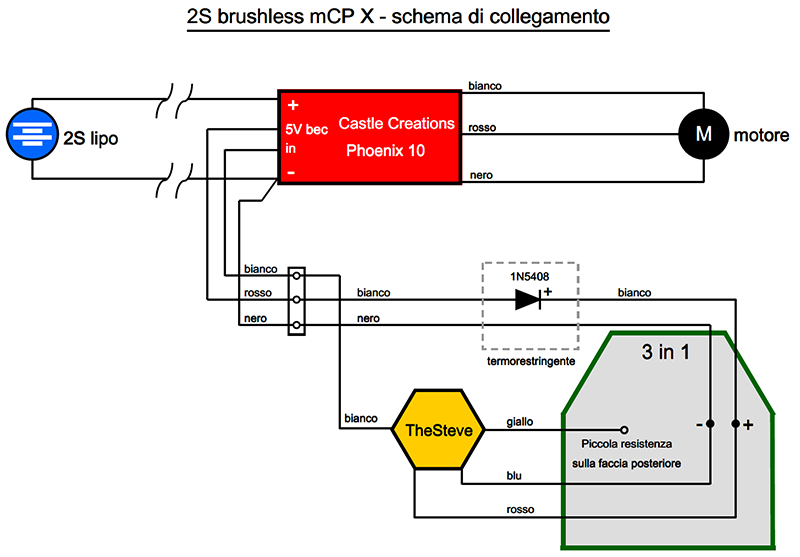 |

|  |
|
22 novembre 11, 16:18
| #8702 (permalink) Top |
| UserPlus | La guida alla conversione 2S con governor - parte 2 La programmazione dell'ESC E' necessario disporre dell'USB-link per la programmazione via PC linkato al post precedente. La necessità nasce dal'accesso a parametri disponibili soltanto via PC ed anche dal fatto che entrare in programmazione con la radio non è proprio semplice, essendo la ricevente alimentata dal bec. La 3 in 1 deve essere alimentata prima dell'esc e correttamente inizializzata prima di mettere in atto la procedura di programmazione via TX, quindi bisognerebbe organizzare un'alimentazione separata. Va da se che il Phoenix 10 può essere utilizzato con e senza governor. Senza non l'ho ancora mai provato, ma suppongo abbia degli ottimi fet che siano in grado di spremere bene il motore. E' bene chiarire i concetti fondamentali e le implicazioni che comporta utilizzare il governor. Il Phoenix 10 è in grado di capire il regime di rotazione del motore pur non disponendo di sensori aggiuntivi. Sfruttando questa caratteristica è in grado di regolare la corrente al motore in modo da mantenere i giri costanti. A seconda delle case costruttrici, il massimo valore impostabile è sempre una percentuale del massimo disponibile alla tensione nominale della lipo. Ciò per garantire una riserva di energia che possa sopperire alle richiesta del motore sotto carichi elevati. Quindi è chiaro che un regolatore con governor abilitato darà un regime di rotazione massimo nettamente inferiore a quanto ottenibile senza governor. Ma qual'è il corretto valore di giri da utilizzare? L'interfaccia di programmazione è interattiva e richiede l'immissione dei parametri necessari alla valutazione del range di giri utilizzabile dall'utente. Questi valori sono: - tensione disponibile - poli magnetici - KV del motore - rapporto di trasmissione E' bene capire come vengono utilizzati i parametri dall'esc, così si hanno gli strumenti per sperimentare a proprio piacimento. La tensione disponibile viene impostata di default a 3,7V/cella. Le istruzioni parlano chiaro: se nel normale utilizzo si verifica un calo di giri sotto sforzo o a fine lipo, bisogna abbassare il valore dei giri massimi al motore. Questo perché le lipo sono soggette a cali di tensione dovuti alla resistenza interna anche quando non sono prossime alla fine della scarica. Per prevenire questa situazione si possono impostare valori di tensione "più reali", ad esempio 3,5V/cella, la qual cosa influenzerà il calcolo finale dei giri disponibili. Un esempio della finestra di configurazione della tensione  I poli magnetici servono al regolatore per riconoscere l'effettivo regime di rotazione del motore. In pratica lui deve sapere quanti impulsi di ritorno riceverà ad ogni giro della parte mobile del motore I poli coincidono col numero di magneti distribuiti sulla cassa degli outrunner o sull'indotto degli inrunner. I nostri motorelli hanno tutti 6 poli gli outrunner e generalmente 2 poli gli inrunner. I KV del motore sono specificati dalla casa produttrice e indicano quanti giri per volt sono in grado di sviluppare in assenza di carico. L'esc utilizza il dato per stimare, in base ai volt disponibili ed al rapporto di trasmissione, i giri disponibili al rotore. In teoria, per fare le cose per bene occorrerebbe conoscere la curva di coppia del motore e l'entità degli attriti meccanici ed aerodinamici per avere una stima precisa dei giri effetivamente "governabili". Nella vita reale è molto probabile che il regolatore abbia un algoritmo generico che tenga grosso modo conto di questi fattori. Se poi il motore si siede con i giri massimi impostati, allora occorre abbassare i giri. L'immissione del rapporto di trasmissione, necessario ovviamente a stabilire i giri al rotore, è facilitato dall'immissione separate del numero dei denti di ghiera e pignone. Un esempio della finestra di configurazione dei dati di motore e trasmissione  Una volta immesse le informazioni su batteria, motore e trasmissione, è possibile impostare i giri al rotore. E' possibile impostarne tre differenti, ciascuno richiamabile dalla TX in base ai valori di throttle 30%, 70% e 100%. Va da se che col governor non si utilizzano curve a V. Quando si immettono i giri desiderati, sarà il software Castle-Link a dirci se il regime è troppo alto o troppo basso, stabilendo così il range di valori utilizzabili. Nell'immagine seguente è mostrata volutamente un'impostazione errata per tutti e tre i valori  C'è poi un'altro parametro fondamentale che contribuisce ad un regime effettivamente costante: è il guadagno del governor. Come in qualsiasi sistema a contro-reazione (un esempio per tutti il gyro), l'entità della reazione ad una azione, determinerà se la risposta sarà ritardata, immediata ed efficace o eccessiva con i caratteristici rimbalzi. Il Phoenix 10 ha tre valori predefiniti, ma è possibile affinare il gain con la bellezza di 50 step. Il corretto valore farà si che nei cambi di passo i giri non calino per riprendersi lentamente e nemmeno che aumentino e diminuiscano con moto oscillatorio smorzato. Concludono le impostazioni di questa ricca pagina del software i valori di Initial Spool-up rate, cioè il soft start, ed "Head Speed Change Rate", cioè la velocità con cui vengono raggiunti i regimi di rotazione da un livello ad un'altro. Ecco uno screenshot della pagina di configurazione di un elicottero con HP08S e pignone 8T.  Alla pagina di configurazione Cutoffs, è possibile stabilire il valore ed il tipo di cut-off, ed anche la protezione da sovracorrente. Per quanto mi riguarda, preferisco allontanare il cut off tenendo il valore molto basso. Per salvare le lipo uso il timer. Per via della natura di funzionamento dell'elicottero, è bene non avere la protezione da sovracorrente, in quanto, a differenza degli aerei, se si spegne il motore non possiamo planare. Se proprio lo si vuole impostare, è bene impostarlo su "insensitive". Ecco la finestra di configurazione Cutoffs  La finestra di configurazione Motor comprende la percentuale di potenza all'avvio, il timing, la direzione del motore e la frequenza del segnale PWM. Il Timing può essere regolato finemente in quanto è suddiviso in 20 step. Per trovare il valore migliore io uso il seguente metodo empirico. Imposto i giri al massimo possibile con governor, angolo le pale a -8° collettivi e poi stacco i servi e motore di coda fisso con nastro l'elicottero sulla bilancia. Poi do gas e vado ai giri massimi misurando la spinta. Il valore di timing che mi da la spinta maggiore lo lascio. Stessa procedura per stabilire la migliore frequenza PWM. Lo screenshot seguente è sempre riferito all'HP08S/8T (migliori impostazioni).  I regolatori Phoenix hanno il firmware aggiornabile. Di 5 che ne ho avuti sotto mano, nessuno era aggiornato e anzi avevano versioni molto antiche del firmware. Se siete collegati a internet, sarà Castle-Link ad avvisarvi che c'è un aggiornamento disponibile. Basta andare nella pagina Software ed eseguire l'aggiornamento.  Una nota finale, a chiudere questa guida che non allungo oltre con impostazioni TX o soluzioni meccaniche che sono troppo soggette ai gusti personali. E' bene utilizzare una curva gas Normal sulla radio con il valore 30%, che sia piatta o con 0% iniziale. Sarà una curva utilizzata unicamente per avviare il motore e non per volare. Perché? Perché il governor deve per forza di cose avere un'impostazione di soft start, che noi impostiamo nell'esc (ricordate che il motore non risponde più in modo proporzionale allo stick del gas). Se partiamo con valori di throttle superiori al 55% la 3 in 1 abilita il soft start interno. Quindi all'esc non arriva un valore univoco, ma un valore variabile in crescita e proprio nella fase più critica del funzionamento dell'esc. Come risultato, capita che facilmente il motore stenta e non parte. Perché non ci si può volare? Perché anche se i giri al rotore sono alti e governati, al motore di coda arriva poca potenza (la massima spinta al motore di coda è in parte funzione del throttle per via di un mix interno alla 3 in 1), quindi il tail blow out è dietro l'angolo. Quindi, Normal per avviare il motore ed alzarlo, poi Stunt1 o Stunt2 (questo con la DX8) per volare. Buoni voli a tutti con l'mCP X, soprattutto se 2S  Paolo |
|
| |
|
22 novembre 11, 16:25
| #8703 (permalink) Top | |
| UserPlus | Citazione:
Il valori troppo bassi sono messi apposta per disabilitare il cut-off. | |
|
| |
|
22 novembre 11, 17:55
| #8705 (permalink) Top | |
| UserPlus | Citazione:
Le impostazioni dell'esc indicate nella guida fanno riferimento a quest'ultimo. | |
|
| |
|
22 novembre 11, 18:05
| #8706 (permalink) Top |
| User Data registr.: 08-10-2005 Residenza: (FR)
Messaggi: 1.037
 |
liftbag il problema del tracking l'hai risolto semplicemente sostituendo il piatto con quello in metallo e con pale in carbonio? Se fosse così prenderò subito sia pale che piatto che il fuori tracking molto evidente mi da proprio fastidio, come per gli altri due eli che ho, è un incubo, aggiusta aggiusta ma quel mezzo mm di fuori tracking c'è sempre (e gli altri due hanno gli uniball svitabili). Su questo poi, originale, non vedo come posso correggere, sapete se esistono uniball in metallo regolabili che uniscono manine al piatto? Hanno fatto un microgioiello flybarless che non da la possibilità di regolare il tracking!? 
__________________ PhoenixLaser-FanCub-F86Sabre-FlitonMiniExtra260-PAElectricShock-4Site-Corsair- UMXPolecat-Mig15-HiroboShuttle-Trex500-Trex250-230S-V931-Pitts 1s-Rifle 1m-Blade230S-Umx Longitude-Umx f-16-Umx Gee Bee-Blade Mcpx BL2-Thunder tiger MD500 |
|
| |
|
22 novembre 11, 18:58
| #8707 (permalink) Top | |
| UserPlus | Citazione:
Quando avevo ancora modelli in plastica, mi ricordo che il tracking era un problema tale che alla fine ci convivevo. Non ho mai indagato più di tanto, ma sono incline a pensare che la responsabilità maggiore ce l'abbia il piatto. I link in plastica si piegano facilmente e basta pochissimo per sballare il tracking. Anche il mozzo infilato male nel cuscinetto potrebbe essere una causa. Hai provato ad utilizzare l'altra coppia di uniball? Ad ogni modo, io con i miei pollicioni, mi ricordo che a volte piegavo gli uniball inutilizzati durante l'inserimento dei link. In genere i link regolabili sono utilizzati in modello con l'anti-rotazione agganciato al piatto, perché nei modelli come il nostro, con il collare anti-rotazione fisso con i link che scorrono all'interno, ci sarebbe un consumo della plastica dovuto alla barra filettata. E poi, diciamo che forse non c'è spazio sufficiente per un link regolabile che debba anche muoversi nel collare. Insomma, sarà un caso, ma da quando uso l'upgrade completo in alluminio del rotore non ho più problemi di tracking, eccetto quando causato dallo spindle piegato oppure, come una volta mi è successo, a causa delle manine RKH danneggiate in un crash. | |
|
| |
|
22 novembre 11, 19:25
| #8708 (permalink) Top |
| User Data registr.: 08-10-2005 Residenza: (FR)
Messaggi: 1.037
|
Il problema dell'abrasione dei link si risolverebbe montando il collare in alluminio sulla testa per i linkage, metallo con due microbarre filettate alle estremità non dovrebbero consumarsi in fretta ma chi come me ha tutto originale non sa proprio dove intervenire per poter finalmente aggiustare il tracking. I link originali li ho sostituiti ruotando anche il piatto che li fissa, con tanta delicatezza a non piegarli, ho provato anche a nastrare una singola pala per bilanciarla anche se pesano esattamente 2gr. l'una ma col nastro l'eli inizia a vibrare sull'asse del rollio. Potrei smontare le manine ma poi?
__________________ PhoenixLaser-FanCub-F86Sabre-FlitonMiniExtra260-PAElectricShock-4Site-Corsair- UMXPolecat-Mig15-HiroboShuttle-Trex500-Trex250-230S-V931-Pitts 1s-Rifle 1m-Blade230S-Umx Longitude-Umx f-16-Umx Gee Bee-Blade Mcpx BL2-Thunder tiger MD500 Ultima modifica di braniac : 22 novembre 11 alle ore 19:33 |
|
| |
|
22 novembre 11, 19:49
| #8709 (permalink) Top | |
| UserPlus | Citazione:
Quant'è che non controlli i dampers? Magari ne hai uno danneggiato. Le pale non si bilanciano con la bilancia pesa grammi (neanche coi centesimi). Ci vuole un bilancia-pale ed il nastro va messo sul baricentro della pala (ma questo non c'entra col traking). Insomma, se non è il piatto e lo spindle, allora o sono le manine, o le pale o è la testa. Le deformazioni che introducono un fuori traking, non si vedono di certo ad occhio nudo (a meno di zone bianche indice di stress della plastica). Dovresti sostituire una parte alla volta per risalire a quella (o a quelle) danneggiata. Io per scovare le manine Rakonheli piegate ho fatto così. | |
|
| |
|
22 novembre 11, 20:16
| #8710 (permalink) Top |
| User Data registr.: 09-07-2011 Residenza: Recanati
Messaggi: 325
 |
Ragazzi mi si è impazzita la zanzarina!  Ditemi che non è la 3in1... praticamente con hold i servi del piatto funzionano perfettamente, ma senza hold quando do gas il servo dietro (elev) dopo essere arrivato a metà si abbassa... non riesco ad alzarlo perchè gira su se stesso Che può essere? ho provato a togliere il motorino di coda ma lo scherzo dei servi lo fa ugualmente, può essere il motore principale?
__________________ 480XXtreme - Vbar Control TRL Losi 8ight 3.0 - Sanwa Mt4 |
|
| |
 |
| Bookmarks |
| |
 Discussioni simili
Discussioni simili | ||||
| Discussione | Autore discussione | Forum | Commenti | Ultimo Commento |
| E-flite Blade 400 3D RTF | Pentium | Elimodellismo Principianti | 27 | 06 febbraio 18 23:02 |
| Fatto passaggio da E-Flite Blade120SR a E-Flite Blade 400 3D consigli e pareri da v | jegor | Elimodellismo Principianti | 12 | 03 febbraio 11 09:46 |
| e-flite blade cp: help!! | lama_con_la_bava | Elimodellismo Motore Elettrico | 13 | 28 marzo 09 22:28 |
| Differenza e-flite Blade Cp e Blade cx2... | gabri81 | Elimodellismo Principianti | 1 | 10 ottobre 07 16:42 |







 Modalità lineare
Modalità lineare

