
- Contenuti
- Community
- Risorse
- Varie

| |
 11 luglio 15, 22:38
11 luglio 15, 22:38
| #11 (permalink) Top | |
| User Data registr.: 02-01-2004 Residenza: Vicino a Saronno
Messaggi: 6.998
| Citazione:
Prima di tutto il takeoff non devi considerarlo come un vero e proprio waypoint. Quando attivi la missione se il primo punto è un takeoff il modello in qualunque direzione lo lanci lui sale in linea retta fino alla quota specificata nel takeoff e poi passa al waypoint 2. In secondo luogo una missione fatta di due punti in linea retta non potrà mai funzionare con un aereo. Il multirotore può seguire tutti i percorsi che vuoi ma un aereo deve seguire dei waypoint più larghi. Dai una occhiata alle missioni che ho postato e vedrai che i waypoint sono piuttosto distanti e formano delle rotte che un aereo puo' seguire. Per quanto riguarda il LAND devi disegnare una missione che porti il modello ad una decina di metri in testata pista e poi metti un waypoint LAND a metà pista....anche in questo caso dai una occhiata alle missione che ho postato. Un consiglio: fai una cosa per volta. 0 - verifica anzitutto che la navigazione automatica funzioni attivando in volo un LOITER e verifica che il modello disegni un bel cerchio mantenendo la quota. Prima naturalmente avrai verificato che la modalità FBWB funzioni a dovere. 1 - disegna una semplice missione con tre punti belli distanti, senza takeoff e senza LAND, e soprattutto su una rotta che un aereo possa seguire. Se disegni una rotta che l'aereo non riesce a seguire il fw comincerà a far fare fare al modello degli ampi cerchi per cercare di tornare in rotta...senza riuscirci. 2 - Decolla in manuale e metti l'aereo in rotta verso il primo WP 3 - attiva AUTO e verifica che l'aereo finisca la missione, poi passi in manuale e atterri. Se vuoi l'ultimo punto puo' essere un LOITER così l'aereo ti gira sopra l'ultimo waypoint. Quando questa missione funziona allora puoi aggiungere il takeoff e quindi una rotta di avvicinamento e quindi il LAND. Disegna una classica rotta di avvicinamento: sottovento, base e finale e fai qualche prova. Al primo colpo non funzionerà e dovrai riprenderlo in manuale ma poi capirai come impostare i vari waypoint per il tuo modello e non avrai più problemi. Ricorda che a fine missione per fare ripartire la missione da 0 devi resettare la missione con un canale o spegnere e accendere la scheda. Ad esempio nella missione qui sotto i WP sono fin troppo vicini e il modello gira abbastanza largo. Ma la missione funziona. Il punto 1 è un takeoff e il punto 5 è un LAND. Il punto 1 è ignorato come posizione e dopo il takeoff il modello si dirige verso il punto 2 che viene centrato ma dopo poichè il WP3 è troppo vicino il modello gira largo. Il punto 4 è l'ultimo WP prima del LAND e va messo ad una quota che consenta al modello di arrivare a 0 al punto di LAND dosando opportunamente motore ed elevatore. Se il punto di LAND è troppo vicino all'ultimo WP l'atterraggio non funziona perchè comunque il FW non pianta il modello per terra. 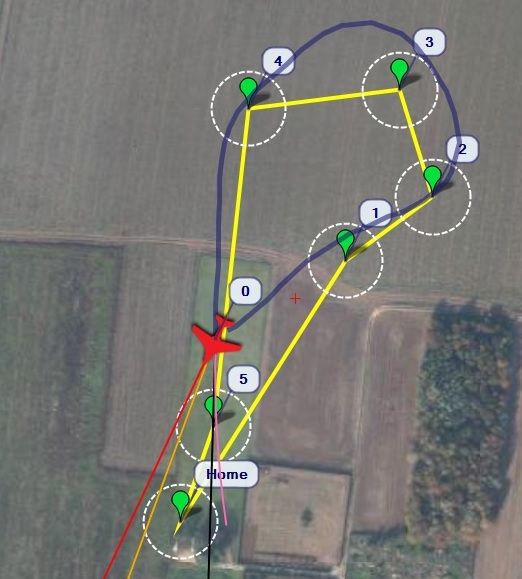 Ultima modifica di TermicOne : 11 luglio 15 alle ore 22:47 | |

|  |
| Bookmarks |
| |
 Discussioni simili
Discussioni simili | ||||
| Discussione | Autore discussione | Forum | Commenti | Ultimo Commento |
| Polaris - Build log | albyone | Aeromodellismo Progettazione e Costruzione | 597 | 05 gennaio 20 13:11 |
| Build Log Albyone 3 | Andrea97 | Aeromodellismo Progettazione e Costruzione | 169 | 15 ottobre 14 00:28 |
| P 47 TF build log | MAB.VOLO | Aeromodellismo Riproduzioni e Semiriproduzioni | 60 | 31 marzo 13 23:33 |
| Build-log : Red_Dragon | Alessio68 | Aeromodellismo Ventole Intubate | 52 | 16 settembre 10 15:36 |











 Modalità elencata
Modalità elencata