 Modellismo
Modellismo
 |
 11 novembre 13, 19:17
11 novembre 13, 19:17
| #91 (permalink) Top |
| User Data registr.: 04-11-2005 Residenza: Ferrara
Messaggi: 588
|
Ciao. Nessuno ha provato ad iniettare i dati exif prodotti dal gps della scheda, in una serie di fotografie scattate in volo? Inviato dal mio Nexus 4 utilizzando Tapatalk
__________________ http://sites.google.com/site/michelemucchi/ |

|  |
|
11 novembre 13, 20:31
| #92 (permalink) Top | |
| Sospeso Data registr.: 20-09-2005
Messaggi: 8.000
| Citazione:
http://www.baronerosso.it/forum/3990479-post6.html | |
|
| |
|
12 novembre 13, 09:54
| #93 (permalink) Top | |
| User Data registr.: 04-11-2005 Residenza: Ferrara
Messaggi: 588
| Citazione:
Mi era sfuggita quella discussione. Ho scritto di la, perché mi sembra più attinente. Saluti.
__________________ http://sites.google.com/site/michelemucchi/ | |
|
| |
|
13 novembre 13, 09:23
| #95 (permalink) Top | |
| User Data registr.: 04-11-2005 Residenza: Ferrara
Messaggi: 588
| Citazione:
ll modello arriva ad ali livellate sul waypoint, subito dopo inclina e vira verso il punto successivo cercando di rimettersi in traiettoria. Avrei preferito poter settare un arco di raccordo tra due traiettorie, lasciando il waypoint all'esterno della virata, ma la cosa non è contemplata. Saluti.
__________________ http://sites.google.com/site/michelemucchi/ | |
|
| |
|
13 novembre 13, 18:51
| #96 (permalink) Top |
| User Data registr.: 02-01-2004 Residenza: Vicino a Saronno
Messaggi: 6.998
|
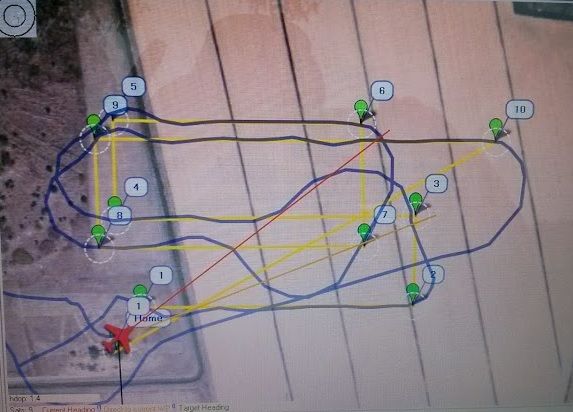
Ho cambiato la posizione della APM mettendola più alta nel cockpit e ho rifatto tutte le calibrazioni degli accelerometri e magnetometro. Ora si comincia a ragionare. Il modello non gira più largo sui WP e atterra perfettamente se la missione prevede un avvicinamento allineato con la pista. 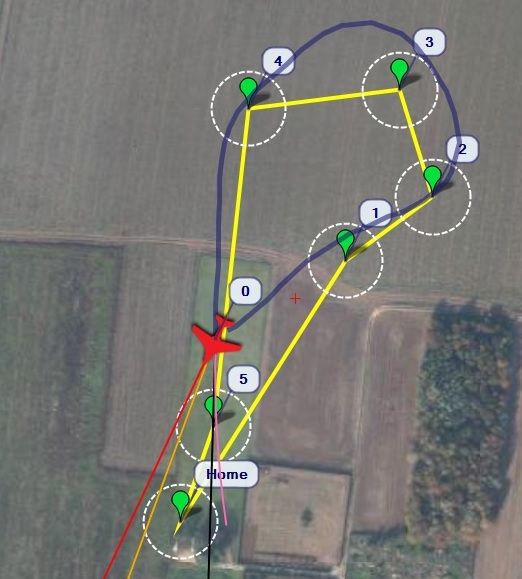 Sono invece diventato matto perchè a volte nel punto più lontano (tra i WP 3 e 4) il modello abbandonava la modalità AUTO e tornava in MANUAL o FBWB e dovevo far ripartire la missione commutando in AUTO da Andropilot. Per questi voletti utilizzo radio in 35Mhz e una vecchia RX Corona...tanto pilota la APM e la radio durante le missioni non viene usata.... GRAVE ERRORE!...è ben vero che la radio non viene usata ma basta un piccolo glitch nel canale 5 che comanda i modi di volo e il modello esce da AUTO (che io imposto con Andropilot). Guardando i log si vede molto bene che il ch5 nel punto più lontano del giro (punto peraltro critico perchè c'è un bel ponte radio nelle vicinanze) ha ogni tanto dei glitch che scendono da 1700 a 1550. Sui servi genererebbero solo una piccola turbolenza sul ch5 fanno invece resettare il modo di volo (se impostato dalla GCS tramite telemetria). Lesson learned: - in zone critiche meglio usare radio in 2.4ghz ") - se vuoi usare radio in 35Mhz imposta il modo di volo da un interruttore sulla radio rc in modo che eventuali glitch sul canale 5 facciano cambiare il modo di volo solo per un istante  Luciano |
|
| |
|
13 novembre 13, 22:25
| #97 (permalink) Top |
| User Data registr.: 11-07-2006 Residenza: Verona
Messaggi: 4.959
|
buono a sapersi anche se io non uso piu le "antenne lunghe". ultimamente sto sperimentando su 5 tutt'ala diversi, cè un sistema per regolare il circle a terra con motore inserito? io sono quello delle prove a terra |
|
| |
|
13 novembre 13, 22:27
| #98 (permalink) Top | |
| User Data registr.: 11-07-2006 Residenza: Verona
Messaggi: 4.959
| Citazione:
immagino che la velocità fosse abbastanza bassa. | |
|
| |
|
14 novembre 13, 10:08
| #99 (permalink) Top | ||
| User Data registr.: 04-11-2005 Residenza: Ferrara
Messaggi: 588
| Citazione:
Devo modificare e far passare i cavi sotto la APM e non sopra.. sicuramente il magnetometro ne soffre parecchio, a giudicare dal valore di magfiled. Ho avuto problemi con il tratto finale in atterraggio, una volta non centrando la pista ma l'area tra il parcheggio e la pista. Tu hai messo il punto land in testata a zero metri e il penultimo punto a X metri basso, in linea? E basta? Io ho fatto così. Citazione:
-valore waypoint, che mi pare sia un diametro, 10. -molto mix alettone>deriva -32 gradi di inclinazione massima sul rollio in navigazione. -9m al secondo la velocità da mantenere. L'easystar vola a quella velocità. Aumentandola, il risultato scadeva, più gas e più comando a picchiare automatico per mantenere l'assetto livellato. -Non ho il tubo di Pitot. Sto per cominciare il capitolo atterraggi! Ossessivamente! Dovrebbe esistere il comando di flare. Qualcuno lo ha provato? Saluti.
__________________ http://sites.google.com/site/michelemucchi/ | ||
|
| |
|
14 novembre 13, 11:33
| #100 (permalink) Top | |
| User Data registr.: 02-01-2004 Residenza: Vicino a Saronno
Messaggi: 6.998
| Citazione:
Per giocare un amico si è messo sul punto di LAND e abbiamo lanciato il modello in AUTO. Il modello ha fatto la missione ed è atterrato esattamente dove era Vittorio che ha dovuto fare un bel salto per farsi passare il modello sotto i piedi ...tra l'ilarità degli astanti.  Uso un vecchio Easy Glider e il WP radius l'ho abbassato a 20m; tutto il resto è a default. Luciano | |
|
| |
 |
| Bookmarks |
| |
 Discussioni simili
Discussioni simili | ||||
| Discussione | Autore discussione | Forum | Commenti | Ultimo Commento |
| Polaris - Build log | albyone | Aeromodellismo Progettazione e Costruzione | 597 | 05 gennaio 20 12:11 |
| Build Log Albyone 3 | Andrea97 | Aeromodellismo Progettazione e Costruzione | 169 | 14 ottobre 14 23:28 |
| P 47 TF build log | MAB.VOLO | Aeromodellismo Riproduzioni e Semiriproduzioni | 60 | 31 marzo 13 22:33 |
| Build-log : Red_Dragon | Alessio68 | Aeromodellismo Ventole Intubate | 52 | 16 settembre 10 14:36 |








 Modalità lineare
Modalità lineare

