 Modellismo
Modellismo
 |
| |
 22 ottobre 13, 21:06
22 ottobre 13, 21:06
| #1 (permalink) Top |
| User Data registr.: 02-01-2004 Residenza: Vicino a Saronno
Messaggi: 6.998
| Arduplane su APM 2.5 - Build log
Ritengo utile aprire questo build log per raggruppare e documentare in una sorta di build log le esperienze di installazione, configurazione e tuning della control board APM 2.5 con firmware Arduplane (o APMPlane come si chiama ora) 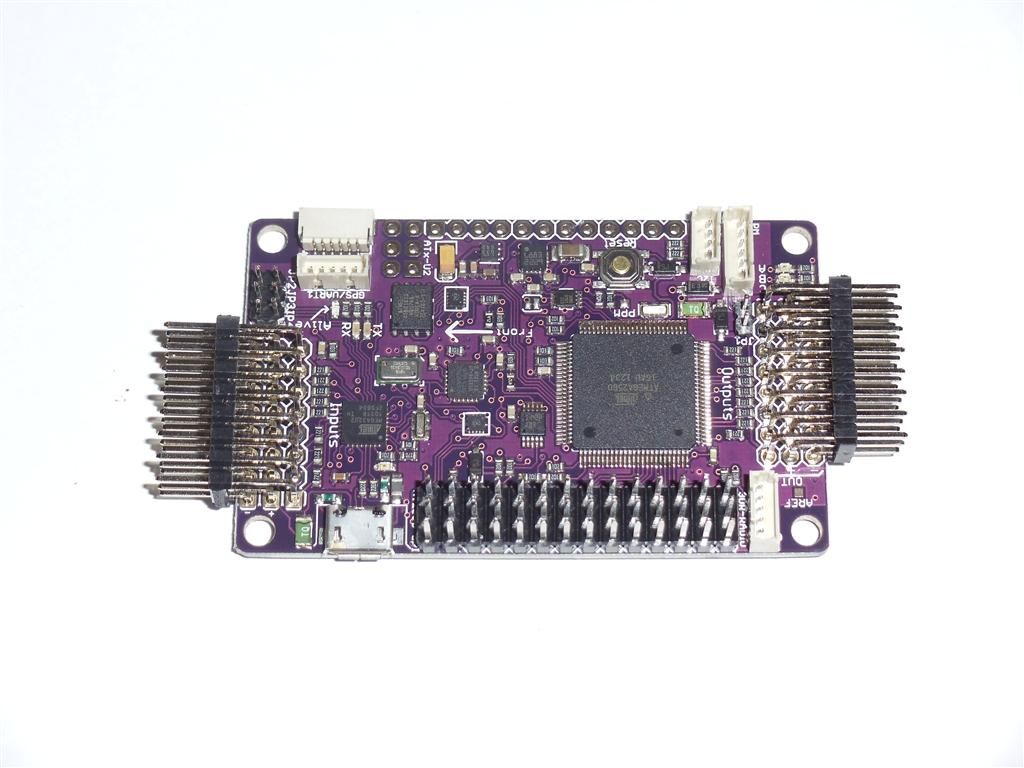 Il focus del thread non saranno gli aspetti e le caratteristiche del veicolo (aliante, tuttala, elettrico, glow, ecc.) ma più propriamente gli aspetti elettronici o informatici legati al software e all'hardware di questo sistema di controllo che puo' essere installato su aeromodelli dalle caratteristiche assai diverse. Ho visto che ci sono almeno un paio di thread su questo tema che testimoniano sinteticamente che questo sistema funziona e quindi possiamo ben sperare http://www.baronerosso.it/forum/fpv-...hi-lo-usa.html http://www.baronerosso.it/forum/aero...o-da-solo.html Penso però sia utile comuqnue aprire questo thread perchè sto partendo da zero con Arduplane su aeromodelli e quindi documentare man mano i passi di setup di un novizio su questo tema puo' essere utile anche ad altri che magari vorranno aderire e percorrere insieme questa avventura....che al momento non so se riuscirò a portare a termine...  L'obiettivo di questo sistema di controllo automatico è quello di disporre di una soluzione in grado di garantire un volo assistito per - attività di training - facilitare il pilotaggio a chi avesse difficoltà (es piloti con una mano sola o comunque con disabilità) - realizzare un semplice volo autonomo con pilotaggio su mappa (guided mode) - realizzare un volo autonomo per eseguire semplici missioni Naturalmente, come già specificato in altri thread su temi analoghi, non c'è alcun obiettivo commerciale nell'utilizzo di questi sistemi che vorrei usare unicamente per desiderio di sperimentazione e comunque a scopo puramente ludico. Ringrazio anticipatamente che ha già percorso questa strada se vorrà indirizzare e magari completare le descrizioni che qui verranno riportate in modo da semplificare la vita al sottoscritto e a coloro che seguiranno. Luciano |

|  |
| Bookmarks |
| |
 Discussioni simili
Discussioni simili | ||||
| Discussione | Autore discussione | Forum | Commenti | Ultimo Commento |
| Polaris - Build log | albyone | Aeromodellismo Progettazione e Costruzione | 597 | 05 gennaio 20 12:11 |
| Build Log Albyone 3 | Andrea97 | Aeromodellismo Progettazione e Costruzione | 169 | 14 ottobre 14 23:28 |
| P 47 TF build log | MAB.VOLO | Aeromodellismo Riproduzioni e Semiriproduzioni | 60 | 31 marzo 13 22:33 |
| Build-log : Red_Dragon | Alessio68 | Aeromodellismo Ventole Intubate | 52 | 16 settembre 10 14:36 |






 nortrop
nortrop 







 Modalità elencata
Modalità elencata