
- Contenuti
- Community
- Risorse
- Varie

| |
 11 luglio 20, 10:22
11 luglio 20, 10:22
| #41 (permalink) Top |
| User Data registr.: 22-05-2006 Residenza: Piacenza
Messaggi: 1.580
 |
In questa immagine ho indicato il senso di rotazione delle eliche principali del mio modello. 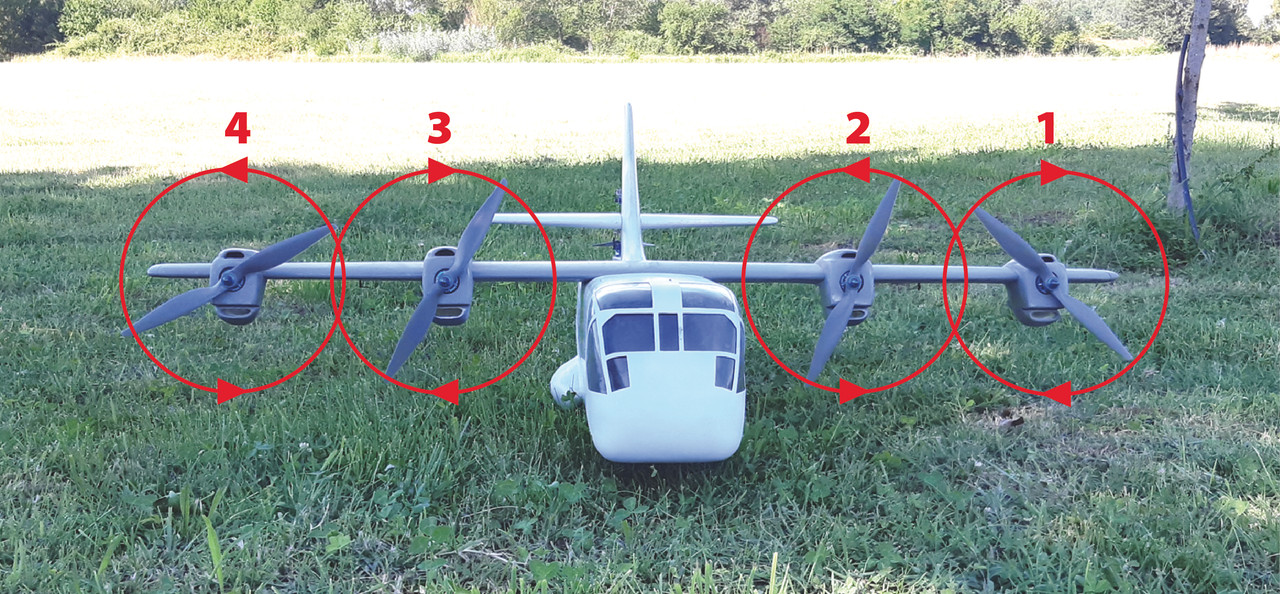 Le eliche sono APC-E 12 x 6" ovviamente 2 spingenti e 2 traenti. Ho deciso il senso di rotazione delle eliche 1 e 4 in modo da ridurre i vortici di estremità: https://en.wikipedia.org/wiki/Wingtip_vortices Le eliche 2 e 3 ruotano in modo che il flusso d'aria nel punto di sovrapposizione tra le eliche adiacenti, sia spinto nella stessa direzione. Il bello è che tutti 'sti ragionamenti vanno a farsi benedire se si guarda questo video dove si vedono le eliche ruotare in maniera completamente diversa rispetto alla mia "ipotesi"  : :Da notare che dal punto di vista aerodinamico l'ala, che è quasi completamente investita dal flusso d'aria dalle eliche, produce (in teoria) un effetto positivo ed uno negativo: 1) Nel volo orizzontale "l'ala soffiata" genera una maggiore portanza diminuendo la velocità di stallo. 2) Nel volo stazionario "l'ala soffiata" spinge all'indietro il modello. Quindi, per un corretto hovering, è indispensabile portare l'ala a un angolo inferiore di 90° rispetto all'orizzontale, utilizzando il comando dell'elevatore e modificando l'offset del servo di rotazione dell'ala. Se il modello sopravviverà ai primi test, mi piacerebbe fare delle eliche quadripala esclusivamente statiche, magari utilizzando una stampante 3D. Ciao! ettore |

|  |
|
12 luglio 20, 13:16
| #43 (permalink) Top |
| User Data registr.: 22-05-2006 Residenza: Piacenza
Messaggi: 1.580
|
Finalmente abbiamo fatto i primi test di decollo e atterraggio in verticale con l’LTV XC-142. La centralina giroscopica con OpenAeroVTOL funziona ottimamente e il modello è stabile anche se come tutti i VTOL risente molto del vento laterale. I parametri di stabilizzazione utilizzati dall’americano Ran D.St. Clair per il suo XC-142 (più piccolo e molto più leggero), si sono dimostrati efficaci anche sul mio modello da 3,5 Kg.. La stabilità sull’asse di rollio e di beccheggio (Roll and Pitch) è notevole. Vale a dire che il mio intervento con la trasmittente è minimale. Mi risulta invece più difficile mantenere il modello controvento muovendolo sull’asse d’imbardata (Yaw). La difficoltà maggiore è mantenere una quota costante che forse deriva da un valore eccessivo di correzione verticale, una sorta di “damping” sull’asse delle Y che di fatto ritarda la risposta dei motori muovendo lo stick del gas. Prima di eseguire la transizione al volo lento orizzontale (Slow Forward Flight) dovrò esercitarmi in modo da poter controllare meglio il modello e dirigerlo dove voglio io…. L’assorbimento totale dei 5 motori e dei 5 servi durante l’hovering dovrebbe essere di circa 1A al minuto. Quindi con una batteria da 5.000 Mah, è meglio atterrare dopo circa 4 minuti. Nei video si vede poco ma ho applicato delle protezioni al muso e alla coda (una specie di pannolino rosa Nel terzo video ho affrettato l’atterraggio perché mi stavo avvicinando troppo alle piante e i quattro magneti che tengono in posizione il muso hanno funzionato ottimamente, senza che il modello si danneggiasse. Come è facile immaginare sono molto soddisfatto. ettore |
|
| |
|
12 luglio 20, 13:25
| #44 (permalink) Top | |
| Gran Decapo Data registr.: 18-03-2007
Messaggi: 14.606
| Citazione:
 Mi pare che l'atterraggio sia molto più facile che col Pogo. Una ventolina dietro per correggere facilmente l'imbardata ?  | |
|
| |
|
13 luglio 20, 22:08
| #46 (permalink) Top | |
| User Data registr.: 22-05-2006 Residenza: Piacenza
Messaggi: 1.580
| Citazione:
Per controllare l’imbardata non è necessario aggiungere altri motori e/o servi ma dovrò solo aumentare la corsa degli alettoni. Bisogna tener presente che quando il mio convertiplano è in volo verticale (fase di volo chiamata per convenzione P.1), lo stick del direzionale muove gli alettoni, i quali, essendo investiti dall’aria delle eliche, muovono il modello sull’asse di imbardata.  Aggiungo che sempre in P.1: - Lo stick degli alettoni controlla la velocità dei motori alari (coppia di sinistra e di destra) e di conseguenza il rollio. - Lo stick del gas controlla tutti i 5 motori. - Lo stick dell’elevatore controlla contemporaneamente 3 cose: 1) la velocità del rotore di coda 2) l’elevatore (che in P.1 serve pochissimo, idem per il direzionale che rimane inattivo) 3) l’inclinazione dell’ala che in P.1 ruota di circa +/- 5°. Inoltre: - il rotore di coda può solo sollevare la coda e tramite i giroscopi provvede a mantenere la fusoliera orizzontale. Per questo motivo, in P.1, è necessario che il modello sia “pesante in coda” ovvero sbilanciato all’indietro. La fase di volo chiamata P.2 è quella tradizionale ovvero con l’ala in orizzontale. In questo caso i comandi sono quelli di un normale aeromodello con la sola differenza che lo stick del direzionale controlla anche i motori per agevolare le virate (differential thrust). In P.2 il modello deve essere bilanciato correttamente e infatti il motore di coda si spegne. Semplice vero??!??….  Ettore | |
|
| |
|
13 luglio 20, 22:43
| #47 (permalink) Top | |
| Gran Decapo Data registr.: 18-03-2007
Messaggi: 14.606
| Citazione:
 Non ti ho seguito in tutto, ma alla fine ho letto una cosa che mi ha fatto sollevare le antenne perchè mi ricorda l'errore fatto col B 26, stai attento alla spinta asimmetrica ( differential thrust a Piacenza  ) in fase P2 ) in fase P2
| |
|
| |
|
14 luglio 20, 00:02
| #48 (permalink) Top | |
| User Data registr.: 05-02-2005 Residenza: Milano
Messaggi: 1.352
| Citazione:
Ancora complimenti per la spettacolare costruzione...
__________________ Se è vero che il denaro parla, l'unica cosa che gli ho sentito dire è «addio» (dal film Analisi di un delitto) | |
|
| |
|
14 luglio 20, 15:16
| #49 (permalink) Top | |
| User Data registr.: 05-01-2017 Residenza: Fossano
Messaggi: 112
| Citazione:
60Ah sono tantini.... che eliche monti? | |
|
| |
|
14 luglio 20, 16:00
| #50 (permalink) Top | |
| User Data registr.: 05-01-2017 Residenza: Fossano
Messaggi: 112
| Citazione:
Per le eliche ho riletto i posti precedenti... 6" di passo per il ruolo che devono fare sono tantini; potresti provare a ridurlo a 4 / 4,5", risparmieresti qualche Ah. Con i multirore un po' ci lavoro, l'ultimo sul quale ho messo le mani è stato un exa da 4,5kg e stava in hovering con un assorbimento medio di 32Ah con una 4s. Ultima modifica di federiconavarra87 : 14 luglio 20 alle ore 16:06 | |
|
| |
 |
| Bookmarks |
| |
 Discussioni simili
Discussioni simili | ||||
| Discussione | Autore discussione | Forum | Commenti | Ultimo Commento |
| Giroscopio su chiglia basculante, consigli | stravanato | Navimodellismo a Vela | 15 | 20 aprile 17 15:45 |
| a proposito di chiglia basculante... | Lele71 | Navimodellismo a Vela | 12 | 20 aprile 10 11:30 |
| stabilizzatore basculante per F3K- help | mau | Aeromodellismo Alianti | 15 | 23 novembre 06 00:10 |
| Piano di coda basculante | bibos | Aeromodellismo | 2 | 25 marzo 05 09:43 |







 Modalità lineare
Modalità lineare

