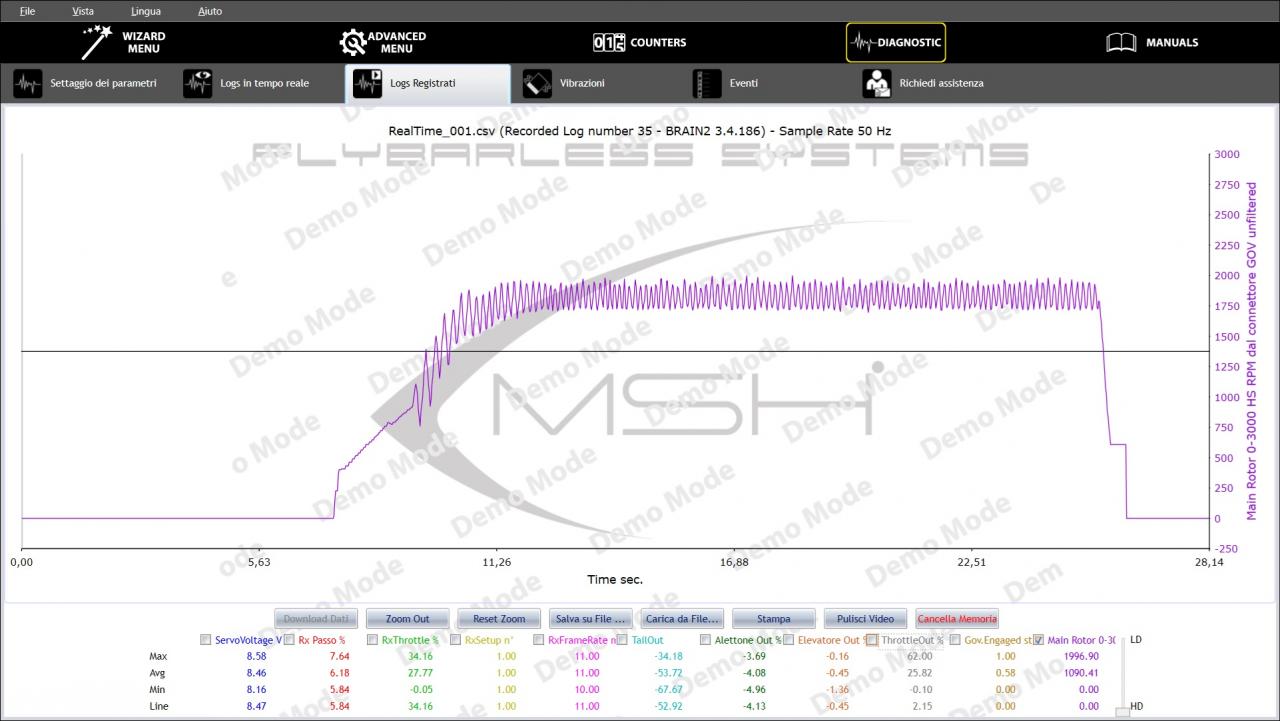
Come è noto, non possono essere usati contemporaneamente due governor perché andrebbero in conflitto tra loro e quando un governor cerca di aumentare gli RPM del motore l’altro governor cercherà di ridurli creando forti oscillazioni degli RPM che si ripercuoterebbero sul rotore anticopia di coda causando oscillazioni della coda.
Nel Real time log che hai inviato sono presenti le oscillazioni degli RPM di cui parlo.
Se vuoi usare il governor della centralina di volo, non puoi usare contemporaneamente anche il governor dell’ESC che devi disattivare configurando l’ESC in modalità aeroplano.
Ovviamente, affinché il segnale del Throttle inviato all’ESC risulti avere un escursione corretta, e non ci siano tempi morti all’avvio o partenze troppo rapide, bisognerà regolare nella trasmittente l’escursione del segnale del Throttle in modo che il segnale in ingresso alla centralina di volo visualizzato nel pannello 5 del Wizard vada da 0% a 100% senza che vengano tramessi valori inferiori (negativi) o maggiori del 100% (come spiegato nelle istruzioni laterali del pannello 5) e nel pannello 12 del Wizard dovranno essere regolati i valori Out MIN e Out MAX in modo che il segnale del Throttle in uscita dalla centralina di volo ed inviato all’ESC abbia l’escursione prevista ed attesa dall’ESC come spiegato nelle istruzioni laterali del pannello 12.
Nel tuo lungo post hai detto tutto tranne la marca e modello del tuo ESC ma comunque nelle istruzioni laterali del pannello 12 del wizard trovi i valori da usare con le varie marche di ESC.
Ti ricordo che queste regolazioni vanno fatte senza pale e possibilmente con il pignone del motore sganciato dalla corona oppure con due cavi del motore scollegati per evitare il rischio di farti male.
Infine, affinché il governor della centralina di volo funzioni correttamente i valori dei divisori (“Impulsi Per Rotazione” e “Rapporto di riduzione rotore principale”) devono essere quelli giusti in modo che la centralina di volo legga i valori corretti e reali della velocità di rotazione del rotore principale.