Ciao a tutti, sono completamente nuovo in questo forum, scusate quindi se sto commettendo qualche errore...tipo aver scelto la categoria del forum errata.
Per un mio amico sto montando un sistema basato su una barchetta descritta prevemente qua:
AMEWI - RC Modellbau, HD Cams, Malinos, Blopens, Puzzle Pilot, Julvik Promotion, Borchen, Paderborn - Boote.
Sto utilizzando Arducopter 2.8 e Mission Planner per avere tutti i dati della telemetria (ho dovuto aggiungere anche un mini sistema arduino per recuperare della telemetria da bus NMEA), ho quindi dovuto modificare Mission Planner per gestire la mia telemtria.
Sino a qui sembra andare tutto bene, ma diciamo che mi manca la gestione dei motori o meglio non riesco a farli funzionare.
Per gestire la potenza ho utilizzato il PDB
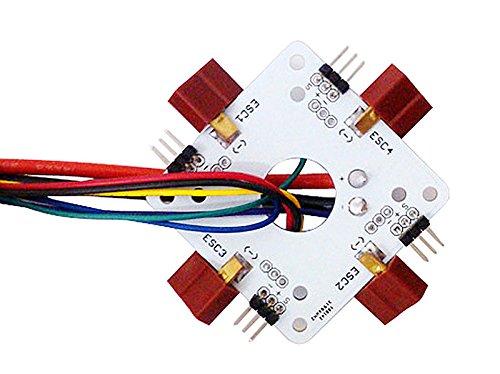
e due ESC come questi

. Dall'arducopter ho tolto il jumper JP1 come descritto dal manuale.
Con il tester vedo che un ESC emette una tensione variabile ma intorno ai 2V mentre l'altro non emette alcuna tensione. Ovvio che non riesco a testare il segnale.
Ho provato a collegare entrambi gli ESC ai motori originali della barchetta (sperando di aver rispettato le polarità) ma quando eseguo un test dei motori su Mission Planner non accade assolutamente nulla.
Io immagino che almeno un ESC sia difettato. Ritenete entrambi?
Potrebbe essere che il motore originale della barca non vada bene per questi ESC?Il motore della barca è questo

. Purtoppo non c'è alcuna descrizione. Ho segnato sul connettore N (nero) R (rosso), B(bianco) per indicare gli originali collegamenti della barca. Ho quindi collegato il rosso ed il nero del motore con quelli dell'ESC mentre il giallo dell'ESC al bianco del motore.
Chiunque potesse darmi una mano ne sarei veramente lieto e grato.
Grazie Simone