Ciao a tutti
apro questa discussione poichè sto costruendomi una TGA cercando di contenere i costi e utilizzando controller e software Open.
Per la meccanica ho scopiazzato dalle realizzazioni di Gregnapola & C. prese da
questa discussione e da
questa qui.
Questi sono gli assi


Dato che l'elettronica era un po' datata come connessione (porta parallela), scrivendo qui sul barone sono stato consigliato di provare un controller open che è
Theremino, che ha una parte controllo motori ed un suo applicativo che legge il GCode e fa muovere la meccanica,
ThereminoCNC.
Vi sono già un paio di discussioni in questa sezione, su cui ho già scritto, ma che sono abbastanza specifiche su il solo controller,
una è questa e
l'altra è questa, che parla un po' in generale di ThereminoCNC.
Vorrei documentare qui la costruzione e cercare aiuti e suggerimenti sul funzionamento del controller/drivers/stepper.
Per me è materia assolutamente nuova, sto leggendo e spero di riuscire a "sfangarmela" in tempi non biblici riducendo al minimo i danni.
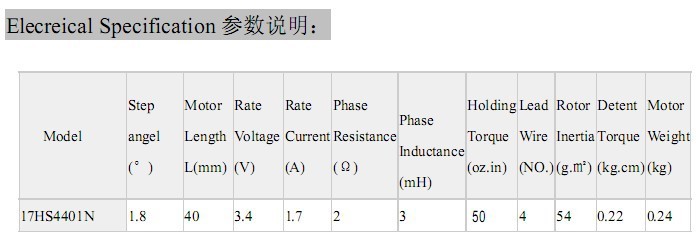
Premesso questo, l'elettronica di partenza l'ho presa qui sul mercatino l'anno scorso ed è composta da 4 stepper NEMA 17 (17hs4401n) che hanno queste specifiche
La scheda di controllo parallela vecchia l'ho messa in cassetto, i drivers vecchi pure, ho tenuto buono l'alimentatore, che è uno switching da 24V 8,3A, regolabile fino a 19,5V.
Il controller che ho comprato è un
theremino MasterDIL V4 
Il controller viene alimentato dall'USB e da quanto mi han detto nelle altre discussioni i 5V/500mA vengono distribuiti sui vari pin +5V/GND.
I drivers sono delle copie cinesi dei
Pololu DRV8825, la versione md20b, che dicono avere queste differenze con la precedente (md20a):
Citazione:
|
The only change is that the newer version connects the sleep and fault lines through a resistor, which acts as a pull-up for the sleep line when this board is plugged into some existing third-party A4988 carrier board sockets.
|
Ora, cosa vuol dire "to pull-up the sleep line" non ho idea di che cosa sia, ma il circuito minimo passa da quello della md20a che è questo:

a quello della md20b, che è questo:

Qui iniziano i primi casini...
Da quel poco che ho capito al driver del motore devono arrivare due tensioni, una logica che serve a comandare il driver (2,5-5,25V), ed una che serve ad alimentare lo stepper in base allo stato del driver ed ai comandi che arrivano dal controller.
Devo dare corrente logica al FAULT perchè il driver si attivi?? O basta che io porti i soli contatti DIR e STEP e GND provenienti dal master per far si che il si metta in funzione? Tutto questo naturalmente considerata la tensione per lo stepper e stepper collegati..
Intanto questa parte, grazie
pietro