Eccoli
Anche in questo caso hai alcune cose da rivedere, ma forse è meglio spiegarle.
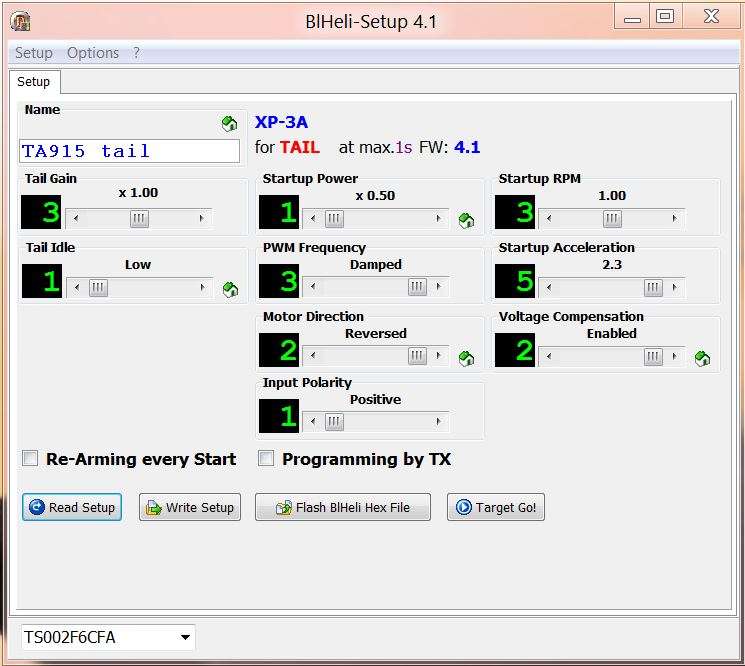
Tail Gain
E' la quantità di risposta che l'esc fornisce in base al valore di throttle che rileva in ingresso.
E' un parametro proporzionale e lasciarlo con il valore di default è quasi sempre la cosa migliore, perché si sfrutta tutta la corsa gas senza arrivare a saturazione precocemente o non arrivare affatto al massimo.
Cioè, con 1.0 sei sicuro di arrivare al massimo numero di giri del motore quando il segnale PWM è al massimo, o quando il segnale ppm è al 100%.
Potresti volerlo abbassare se piloti un motore 1S di coda con un XP-7A alimentato a 2S, proprio per evitare di survoltare il motore ed è proprio ciò che ho fatto con l'mQX alimentato a 2S.
Più raro è il caso in cui ci si trovi nella necessità di alzarlo, anzi non mi viene in mente nessun esempio, quindi riportalo a 1.0.
Tail Idle
E' un'altro parametro molto importante.
Per motivi di sicurezza, con questo codice concepito per tail esc, si evita lo spegnimento del motore in corrispondenza di un valore di throttle pari a zero. Cioè, il motore continua a girare per qualche secondo e poi si spegne.
Il motivo è che i motori brushless hanno un avvio complicato, che stressa i fet, per forza di cose rallentato ed anche con un certo grado di incertezza se paragonati ai motori brushed.
Non si può rischiare di ritardare la partenza del motore quando la coppia aumenta all'improvviso, perché l'eli piroetterebbe ed il tail gyro potrebbe perdere totalmente il controllo, quindi è meglio fare in modo che il motore giri sempre, cioè che in volo non si spenga mai.
Ma a quanti giri minimi deve andare il motore quando il gas è a zero? Lo stabilisce proprio il Tail Idle.
Il valore più basso possibile compatibilmente con la condizione che il motore non si spenga è sempre la scelta migliore.
Con gli HP03T e HP02T il valore minimo è perfettamente supportato.
Invece con gli M5/C05M, mi accade che a volte (sull'mQX) un motore si spenga ed infatti quando riparte c'è sempre un sussulto, uno scompenso. Ma è un prezzo che pago volentieri, perché nel quad, alzare il tail idle equivale a perdere rateo di piroetta ed altre cosette nel volo.
Startup Power
Si tratta dello stesso parametro che si riscontra nella versione Main del codice.
Va tenuto più basso possibile compatibilmente con la garanzia che il motore di avvii nel 100% dei casi, ma solo se parliamo di tail esc perché se per il main un fallimento è accettabile, per il tail no, perché parte a frullino.
E allora perché non teniamo più alto?
Perché l'esc di coda è spesso piccolo e delicato. Una serie di partenze ripetute in rapida sequenza, come quando ad esempio il main esc fallisce l'avvio a più riprese, porta i fet a surriscaldarsi, sia quelli del main, sia quelli del tail esc, e questo surriscaldamento è molto influenzato da questo parametro. Al capolinea ci arriva quasi sempre prima il tail esc.
Anche in questo caso non ho mai avuto problemi con HP03T e HP02T lasciando questo valore al minimo possibile.
Startup RPM
La sequenza di avvio del motore dura intorno ai 2 secondi, ed i tre parametri
Power,
RPM e
Acceleration riguardano solo ed unicamente quasta delicata fase.
Il programmatore ha stabilito un valore arbitrario come valore dei giri che il motore dovrebbe raggiungere durante questa fase, in base alla media dei valori ottimali ottenuti con vari motori presi in esame.
Quando si hanno incertezze in avvio non riconducibili ad eccessi di consumo, cioè per fare un esempio con l'mCP X, il motore fallisce lo spool-up anche se il led della 3 in 1 non ha nessun calo di luminosità, è utile giocare con questo parametro per vedere di risolvere.
Stertup Acceleration
Questo valore, modifica la scala dei tempi di tutto il processo di spoolup.
I due secondi che ho indicato poco sopra non sono un parametro fisso, ma dipendono proprio da questa impostazione.
In parole povere con questo parametro si dice all'esc in quanto tempo deve sbrigare il processo di spool-up.
Negli esc di coda, viste le esigue masse in gioco, è quasi sempre possibile utilizzare il massimo valore (sempre nel mio caso), il che significa che anche in occasione di un fortuito spegnimento del motore di coda, il successivo riavvio sarà il più rapido possibile.
Per il main esc, la regolazione di questo parametro segue le stesse indicazioni vista per lo Startup RPM.
Voltage Compensation
Questo parametro devo ancora capirlo bene, ma credo che modifichi il tail gain o il P-Gain (nella versione main con governor) aumentandoli in automatico per compensare la caduta di tensione della lipo.
Nelle prime versioni questo parametro creava effetti indesiderati, con le ultime versioni no e siccome Steffen, Dylan e gli altri lo usano, allora lo uso anch'io, anche se non ne ho ancora compreso a fondo il meccanismo
