 Modellismo
Modellismo
 |
| |
 03 giugno 10, 14:51
03 giugno 10, 14:51
| #1 (permalink) Top |
| User Data registr.: 23-09-2008 Residenza: Provincia di Savona
Messaggi: 3.063
| ArmQuad quadricottero per riprese aeree e volo acrobatico
L' ARMQUAD e' un quadricottero, ancora in fase sperimentale e in sviluppo (in futuro anche esacottero coassiale a Y , esacottero standard, ottocottero ) basato su processore ARM7 ad alte prestazioni. L'ambizioso obiettivo finale e' quello di ottenere una piattaforma ottimizzata per le riprese / foto aeree con algoritmi e funzioni di gestione movimento cam adatte allo scopo senza tralasciare la possibilità del volo acrobatico. L'hardware impiega tutti prodotti commerciali quindi con le garanzie di reperibilità, affidabilità e certificazioni tipiche. Il software di controllo e' interamente di mia creazione. In una prima fase di test ho impiegato il wii motion plus come triplo gyroscopio. [modifica al wii motion plus per utilizzarlo come triplo gyroscopio analogico] Primi voli La seconda fase consiste nell'utilizzare sensori più adatti e con un rapporto costo / prestazioni elevato. Dopo aver valutato e misurato le vibrazioni tipiche generate da un multirotore [ analisi spettrale delle vibrazioni generate da un quadricottero ] 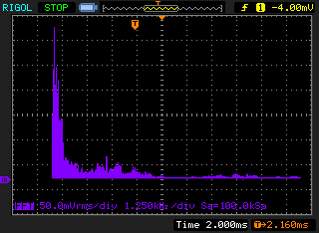 in questi giorni iniziero' a sostituire il wii motion plus con un triplo gyroscopio i2c ad alta risoluzione SparkFun Electronics - Triple-Axis Digital-Output Gyro ITG-3200 Breakout La modalità di volo attuale e' quella acrobatica tutto il resto è ancora da sviluppare. Aggiornerò questo thread ad ogni progresso raggiunto. Un saluto a tutti i partecipanti della nuova sezione Multirotori |

|  |
| Bookmarks |
| |














 Modalità elencata
Modalità elencata