
- Contenuti
- Community
- Risorse
- Varie

| |
 01 luglio 11, 01:57
01 luglio 11, 01:57
| #5232 (permalink) Top | |
| UserPlus | Citazione:
| |

|  |
|
01 luglio 11, 02:19
| #5233 (permalink) Top |
| User Data registr.: 20-08-2010 Residenza: Palermo
Messaggi: 2.132
|
Ma i gradi delle pale corrispondono? Magari le pale fanno per esempio -8° +10°, per cui vi è necessario mettere una percentuale maggiore in negativo per avere la stessa spinta. Oppure i giochi sono ancora troppo alti per misurare con precisione?
__________________  Attenzione, Novizio! Attenzione, Novizio!  Poca esperienza, non vi fidate! Poca esperienza, non vi fidate! ") Felici atterraggi Felici atterraggi  |
|
| |
|
01 luglio 11, 09:29
| #5234 (permalink) Top | |
| User Data registr.: 29-06-2009 Residenza: napoli
Messaggi: 10.416
| Citazione:
PS ti consiglio se già non lo fai di collegare la lipo NON dentro l' alloggiamento , a inizializzazione dei giroscopi avvenuta ( 4/5secondi) la inserisci nel suo alloggiamento . Ti eviti così di muovere il modello in fase di inizializzazione
__________________ http://www.youtube.com/user/edubufly | |
|
| |
|
01 luglio 11, 10:48
| #5235 (permalink) Top |
| User Data registr.: 02-09-2010
Messaggi: 32
|
grazie udubu per l'incoraggiamento, seguirò i tuoi consigli però la difficoltà l'ho dopo il decollo forse perchè il solo tende di più ad autofermarsi quandi lasci i comandi, questo invece mi sembra di capire che va più tenuto contrastando...  è cosi?? è cosi?? |
|
| |
|
01 luglio 11, 11:28
| #5236 (permalink) Top |
| UserPlus | Modifica doppio coreless in coda
Ho ultimato la mia seconda coda con doppio motore standard (o bmcx2 CCW). L'ho sostituita al motore da 7 mm (col ruotino del 120SR accorciato) del mio mCP X con motore inrunner e, magia, neanche il minimo accenno di oscillazioni agli stop e tenuta incredibile nella quasi totalità delle condizioni. Quasi perché a 6000 rpm, con 80% di travel pitch e manovre deliberatamente sbagliate ho rilevato uno scodamento di non più di 45°, ma le condizioni di innesco sono decisamente irreali, cioè se uno sta volando e non avendo una crisi epilettica ai pollici, non può succedere. Da ribadire che non si tratta di perdita incontrollata della coda, ma di uno sbandamento, recuperabile, mentre avviene, agendo sul timone. Insomma, attualmente il motore inrunner sta dimostrando prestazioni paurose e il doppio motore di coda è il suo degno alleato. Con questo risultato, ho deciso di non cercare più, almeno per ora, una soluzione per una coda brushless, ma piuttosto di dedicarmi alla ricerca di un motore principale ancora migliore, o in termini di peso, o in termini di potenza legata a qualcosa di meno in termini di KV. Dato che ormai ho la certezza che la soluzione è più che ottima, posto le foto di come l'ho realizzata. Un solo dubbio: non sono sicuro se possa garantire la tenuta in abbinata col motore E-flite brushed. Sono sempre più convinto che questo motore, sotto sforzo eccessivo si comporti quasi come un cortocircuito, cioè, penso che in certe condizione assorbe talmente tanta corrente (con conseguente calo improvviso della tensione) da mandare in crisi il gyro. In tal caso anche questa coda non avrebbe chance di tenere. La lavorazione sui due supporti motore di coda è differente. Su di uno pratico un taglio a circa 45° sull'innesto del trave  Sull'altro elimino la parte piatta anti-rotazione passando a mano una punta da trapano da 2mm nel foro per il trave  In questo modo, posso infilare sul trave prima quello senza dispositivo anti-rotazione facendo uscire il tubo in carbonio. Poi infilo quello tagliato a 45° mandandolo a battuta sull'anti-rotazione. Infine avvicino bene il primo porta motore al secondo allineandolo bene  In pratica li ho messi in dima per la successiva fusione col il saldatore (come si fa per accorciare i bracci degli swashplate dei 4 canali). Trovo sia necessario apportare materiale. Ho usato la plastica ricavata da un terzo portamotore malmesso. Il risultato finale   A questo punto non resta che montare i motori. Nel porta motore posteriore lo si monta rovesciato con l'asse verso sinistra (guardando da dietro), mentre ovviamente nell'anteriore si monta normalmente, con l'asse a destra del trave. 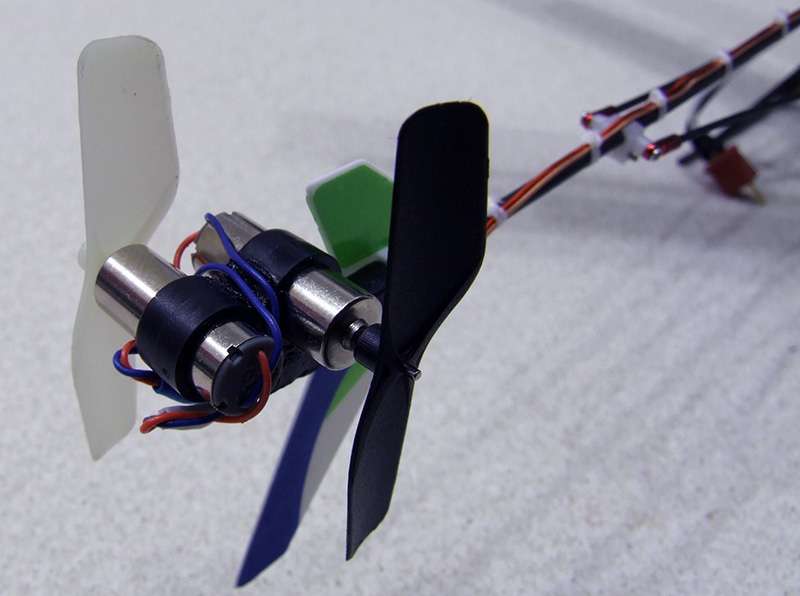 Si collegano in parallelo invertendo i fili, rosso con blu, in modo che abbiano senso di rotazione opposto.  I ruotini si montano mantenendo l'identico orientamento, quindi quello posteriore si infila procedendo dal foro esterno, invece che da quello solito. Forse da questa immagine si capisce meglio cosa intendo  Naturalmente occorre verificare che il senso di rotazione sia quello giusto prima di volare. Nel caso basta invertire la il connettore sulla 3 in 1. Poiché l'efficienza è davvero alta, non servono travi di coda lunghi, io consiglio di allungarlo quel poco necessario a tenere il ruotino anteriore fuori dal flusso del rotore. Questo aiuta anche un po' nel migliorare il centro di gravità, che comunque con certi motori o certe lipo non è possibile correggere se non aggiungendo peso in punta alla canopy. Con lipo del fattore di forma E-flite non è possibile centrare il baricentro perché non possono avanzare. Meglio le Hyperion 320 con porta-batteria Astroid o a velcro. Con il C05M, neanche con le Hyperion 320 si riesce a correggere il cg alla perfezione, ma poco importa, perché vola a meraviglia lo stesso. Un'ultima nota strana. davvero non capisco il perché, ma con questo doppio rotore, l'elicottero le piroette me le fa in piano. Con qualsiasi motore singolo in coda l'elicottero piega in avanti o indietro a seconda del verso. La cosa l'ho rilevata su entrambi gli elicotteri modificati. Non mi resta che augurare buoni voli con coda modello spada laser a chi vorrà cimentarsi. Paolo |
|
| |
|
01 luglio 11, 11:36
| #5237 (permalink) Top |
| UserPlus | Guida alla conversione brushless #1
Mi tocca creare un post riassuntivo dei vari passi (con link), perché in firma non ci stanno più di 700 caratteri. Programmazione e posizionamento ESC Collegamento del convertitore e del motore Il telaio, la TX e la coda Il pignone e la batteria Modifica doppio coreless in coda |
|
| |
|
01 luglio 11, 13:09
| #5238 (permalink) Top | ||
| User Data registr.: 07-01-2010 Residenza: Imola (BO)
Messaggi: 316
| Citazione:
Citazione:
") Ciao, Paolo
__________________ Il mondo non è perfetto. Scegliere come vederlo, è lunico vero potere che abbiamo. (Torey L. Hayden) | ||
|
| |
|
01 luglio 11, 13:42
| #5239 (permalink) Top | |
| UserPlus | Citazione:
Ho appena ordinato un outrunner da Hobbyking che a detta degli utilizzatori è più potente dell'inrunner walkera, anche se sulla carta sembra una ciofeca rispetto al C05M. Ma hobbyking sbaglia spesso e volentieri a riportare i dati dei prodotti e secondo me questo è uno di queli casi. Il C05M è senza dubbio meno potente dell'inrunner Walkera. Quindi se l'C05XL è più potente, hanno quantomeno scambiato i dati. Il C05M assorbe 4A e sviluppa 40W, mentre il C05XL assorbe 6A e sviluppa 60W. Se è così, è una bomba, più potente e leggero dell'inrunner Walkera  | |
|
| |
|
01 luglio 11, 15:27
| #5240 (permalink) Top |
| User Data registr.: 18-12-2010 Residenza: Roma
Messaggi: 8.567
|
Ti avverto che la velocità di fuga dalla terra è di 11m/sec ... poi non ti lamentare se te lo dobbiamo andare a prendere su Marte ...
__________________ La bibbia dei Bladoni V6, Blade 120SR - Guida Crius Aio Pro V1.3 ATOM 500 - Blade 400 FBL STRETCHED 6s - 120SR. |
|
| |
 |
| Bookmarks |
| |
 Discussioni simili
Discussioni simili | ||||
| Discussione | Autore discussione | Forum | Commenti | Ultimo Commento |
| E-flite Blade 400 3D RTF | Pentium | Elimodellismo Principianti | 27 | 06 febbraio 18 23:02 |
| Fatto passaggio da E-Flite Blade120SR a E-Flite Blade 400 3D consigli e pareri da v | jegor | Elimodellismo Principianti | 12 | 03 febbraio 11 09:46 |
| e-flite blade cp: help!! | lama_con_la_bava | Elimodellismo Motore Elettrico | 13 | 28 marzo 09 22:28 |
| Differenza e-flite Blade Cp e Blade cx2... | gabri81 | Elimodellismo Principianti | 1 | 10 ottobre 07 16:42 |




 , portando decentemente il solo pro credevo di poter fare subito un controllo dignitoso e invece è come la prima volta col solo: schianti ripetuti...
, portando decentemente il solo pro credevo di poter fare subito un controllo dignitoso e invece è come la prima volta col solo: schianti ripetuti...



 Modalità lineare
Modalità lineare

